Doctor: Fault Management and Maintenance¶
| Project: | Doctor, https://wiki.opnfv.org/doctor |
||||||||
|---|---|---|---|---|---|---|---|---|---|
| Editors: | Ashiq Khan (NTT DOCOMO), Gerald Kunzmann (NTT DOCOMO) |
||||||||
| Authors: | Ryota Mibu (NEC), Carlos Goncalves (NEC), Tomi Juvonen (Nokia), Tommy Lindgren (Ericsson), Bertrand Souville (NTT DOCOMO), Balazs Gibizer (Ericsson), Ildiko Vancsa (Ericsson) and others. |
||||||||
| Abstract: | Doctor is an OPNFV requirement project [DOCT]. Its scope is NFVI fault management, and maintenance and it aims at developing and realizing the consequent implementation for the OPNFV reference platform. This deliverable is introducing the use cases and operational scenarios for Fault Management considered in the Doctor project. From the general features, a high level architecture describing logical building blocks and interfaces is derived. Finally, a detailed implementation is introduced, based on available open source components, and a related gap analysis is done as part of this project. The implementation plan finally discusses an initial realization for a NFVI fault management and maintenance solution in open source software. |
||||||||
| History: |
|
Definition of terms
Different SDOs and communities use different terminology related to NFV/Cloud/SDN. This list tries to define an OPNFV terminology, mapping/translating the OPNFV terms to terminology used in other contexts.
- ACT-STBY configuration
- Failover configuration common in Telco deployments. It enables the operator to use a standby (STBY) instance to take over the functionality of a failed active (ACT) instance.
- Administrator
- Administrator of the system, e.g. OAM in Telco context.
- Consumer
- User-side Manager; consumer of the interfaces produced by the VIM; VNFM, NFVO, or Orchestrator in ETSI NFV [ENFV] terminology.
- EPC
- Evolved Packet Core, the main component of the core network architecture of 3GPP’s LTE communication standard.
- MME
- Mobility Management Entity, an entity in the EPC dedicated to mobility management.
- NFV
- Network Function Virtualization
- NFVI
- Network Function Virtualization Infrastructure; totality of all hardware and software components which build up the environment in which VNFs are deployed.
- S/P-GW
- Serving/PDN-Gateway, two entities in the EPC dedicated to routing user data packets and providing connectivity from the UE to external packet data networks (PDN), respectively.
- Physical resource
- Actual resources in NFVI; not visible to Consumer.
- VNFM
- Virtualized Network Function Manager; functional block that is responsible for the lifecycle management of VNF.
- NFVO
- Network Functions Virtualization Orchestrator; functional block that manages the Network Service (NS) lifecycle and coordinates the management of NS lifecycle, VNF lifecycle (supported by the VNFM) and NFVI resources (supported by the VIM) to ensure an optimized allocation of the necessary resources and connectivity.
- VIM
- Virtualized Infrastructure Manager; functional block that is responsible for controlling and managing the NFVI compute, storage and network resources, usually within one operator’s Infrastructure Domain, e.g. NFVI Point of Presence (NFVI-PoP).
- Virtual Machine (VM)
- Virtualized computation environment that behaves very much like a physical computer/server.
- Virtual network
- Virtual network routes information among the network interfaces of VM instances and physical network interfaces, providing the necessary connectivity.
- Virtual resource
- A Virtual Machine (VM), a virtual network, or virtualized storage; Offered resources to “Consumer” as result of infrastructure virtualization; visible to Consumer.
- Virtual Storage
- Virtualized non-volatile storage allocated to a VM.
- VNF
- Virtualized Network Function. Implementation of an Network Function that can be deployed on a Network Function Virtualization Infrastructure (NFVI).
1. Introduction¶
The goal of this project is to build an NFVI fault management and maintenance framework supporting high availability of the Network Services on top of the virtualized infrastructure. The key feature is immediate notification of unavailability of virtualized resources from VIM, to support failure recovery, or failure avoidance of VNFs running on them. Requirement survey and development of missing features in NFVI and VIM are in scope of this project in order to fulfil requirements for fault management and maintenance in NFV.
The purpose of this requirement project is to clarify the necessary features of NFVI fault management, and maintenance, identify missing features in the current OpenSource implementations, provide a potential implementation architecture and plan, provide implementation guidelines in relevant upstream projects to realize those missing features, and define the VIM northbound interfaces necessary to perform the task of NFVI fault management, and maintenance in alignment with ETSI NFV [ENFV].
1.1. Problem description¶
A Virtualized Infrastructure Manager (VIM), e.g. OpenStack [OPSK], cannot detect certain Network Functions Virtualization Infrastructure (NFVI) faults. This feature is necessary to detect the faults and notify the Consumer in order to ensure the proper functioning of EPC VNFs like MME and S/P-GW.
- EPC VNFs are often in active standby (ACT-STBY) configuration and need to switch from STBY mode to ACT mode as soon as relevant faults are detected in the active (ACT) VNF.
- NFVI encompasses all elements building up the environment in which VNFs are deployed, e.g., Physical Machines, Hypervisors, Storage, and Network elements.
In addition, VIM, e.g. OpenStack, needs to receive maintenance instructions from the Consumer, i.e. the operator/administrator of the VNF.
- Change the state of certain Physical Machines (PMs), e.g. empty the PM, so that maintenance work can be performed at these machines.
Note: Although fault management and maintenance are different operations in NFV, both are considered as part of this project as – except for the trigger – they share a very similar work and message flow. Hence, from implementation perspective, these two are kept together in the Doctor project because of this high degree of similarity.
2. Use cases and scenarios¶
Telecom services often have very high requirements on service performance. As a consequence they often utilize redundancy and high availability (HA) mechanisms for both the service and the platform. The HA support may be built-in or provided by the platform. In any case, the HA support typically has a very fast detection and reaction time to minimize service impact. The main changes proposed in this document are about making a clear distinction between fault management and recovery a) within the VIM/NFVI and b) High Availability support for VNFs on the other, claiming that HA support within a VNF or as a service from the platform is outside the scope of Doctor and is discussed in the High Availability for OPNFV project. Doctor should focus on detecting and remediating faults in the NFVI. This will ensure that applications come back to a fully redundant configuration faster than before.
As an example, Telecom services can come with an Active-Standby (ACT-STBY) configuration which is a (1+1) redundancy scheme. ACT and STBY nodes (aka Physical Network Function (PNF) in ETSI NFV terminology) are in a hot standby configuration. If an ACT node is unable to function properly due to fault or any other reason, the STBY node is instantly made ACT, and affected services can be provided without any service interruption.
The ACT-STBY configuration needs to be maintained. This means, when a STBY node is made ACT, either the previously ACT node, after recovery, shall be made STBY, or, a new STBY node needs to be configured. The actual operations to instantiate/configure a new STBY are similar to instantiating a new VNF and therefore are outside the scope of this project.
The NFVI fault management and maintenance requirements aim at providing fast failure detection of physical and virtualized resources and remediation of the virtualized resources provided to Consumers according to their predefined request to enable applications to recover to a fully redundant mode of operation.
- Fault management/recovery using ACT-STBY configuration (Triggered by critical error)
- Preventive actions based on fault prediction (Preventing service stop by handling warnings)
- VM Retirement (Managing service during NFVI maintenance, i.e. H/W, Hypervisor, Host OS, maintenance)
2.1. Faults¶
2.1.1. Fault management using ACT-STBY configuration¶
In Fig. 2.1, a system-wide view of relevant functional blocks is presented. OpenStack is considered as the VIM implementation (aka Controller) which has interfaces with the NFVI and the Consumers. The VNF implementation is represented as different virtual resources marked by different colors. Consumers (VNFM or NFVO in ETSI NFV terminology) own/manage the respective virtual resources (VMs in this example) shown with the same colors.
The first requirement in this use case is that the Controller needs to detect faults in the NFVI (“1. Fault Notification” in Fig. 2.1) affecting the proper functioning of the virtual resources (labelled as VM-x) running on top of it. It should be possible to configure which relevant fault items should be detected. The VIM (e.g. OpenStack) itself could be extended to detect such faults. Alternatively, a third party fault monitoring tool could be used which then informs the VIM about such faults; this third party fault monitoring element can be considered as a component of VIM from an architectural point of view.
Once such fault is detected, the VIM shall find out which virtual resources are affected by this fault. In the example in Fig. 2.1, VM-4 is affected by a fault in the Hardware Server-3. Such mapping shall be maintained in the VIM, depicted as the “Server-VM info” table inside the VIM.
Once the VIM has identified which virtual resources are affected by the fault, it needs to find out who is the Consumer (i.e. the owner/manager) of the affected virtual resources (Step 2). In the example shown in Fig. 2.1, the VIM knows that for the red VM-4, the manager is the red Consumer through an Ownership info table. The VIM then notifies (Step 3 “Fault Notification”) the red Consumer about this fault, preferably with sufficient abstraction rather than detailed physical fault information.
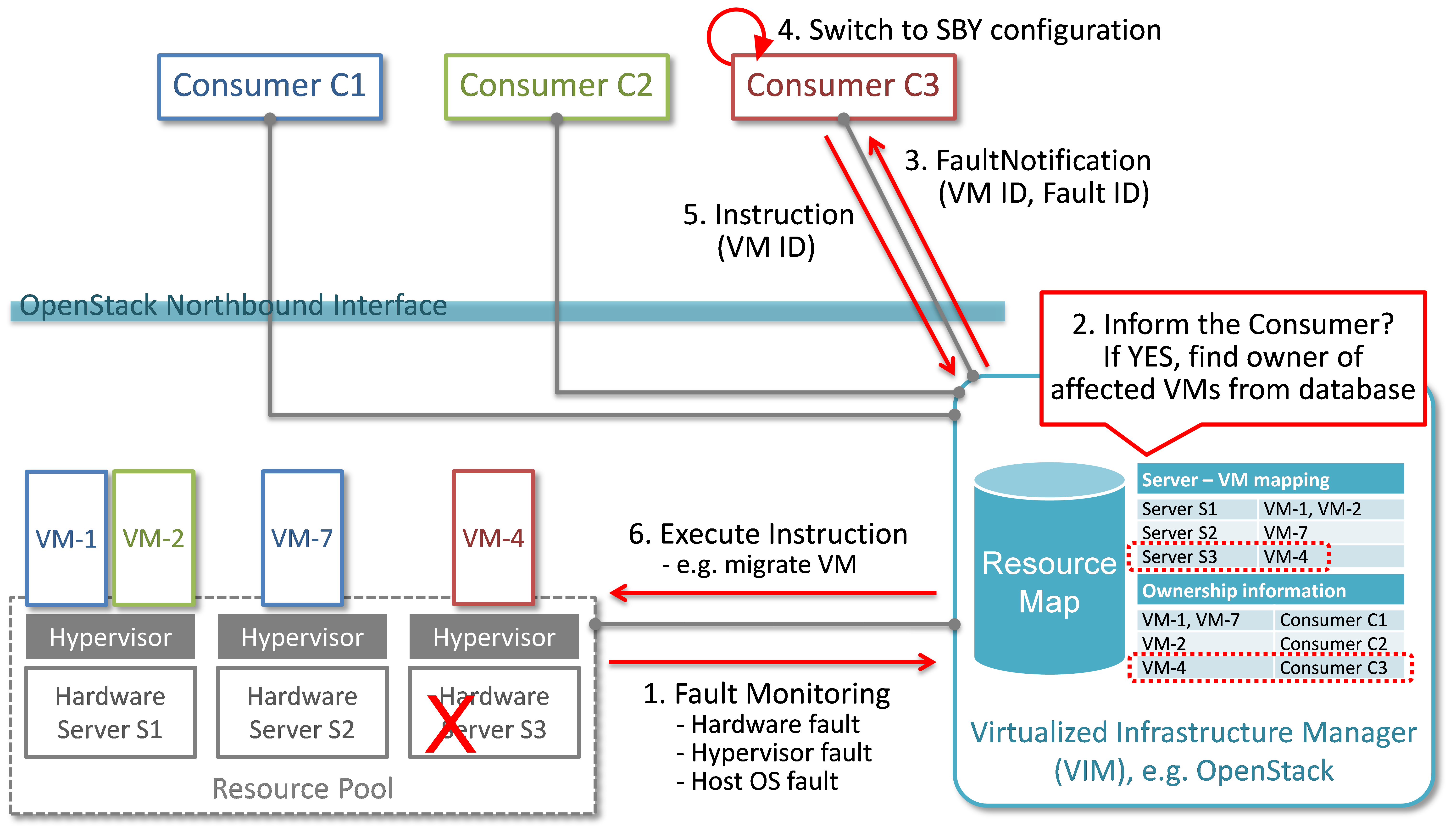
Fault management/recovery use case¶
The Consumer then switches to STBY configuration by switching the STBY node to ACT state (Step 4). It further initiates a process to instantiate/configure a new STBY. However, switching to STBY mode and creating a new STBY machine is a VNFM/NFVO level operation and therefore outside the scope of this project. Doctor project does not create interfaces for such VNFM level configuration operations. Yet, since the total failover time of a consumer service depends on both the delay of such processes as well as the reaction time of Doctor components, minimizing Doctor’s reaction time is a necessary basic ingredient to fast failover times in general.
Once the Consumer has switched to STBY configuration, it notifies (Step 5 “Instruction” in Fig. 2.1) the VIM. The VIM can then take necessary (e.g. pre-determined by the involved network operator) actions on how to clean up the fault affected VMs (Step 6 “Execute Instruction”).
The key issue in this use case is that a VIM (OpenStack in this context) shall not take a standalone fault recovery action (e.g. migration of the affected VMs) before the ACT-STBY switching is complete, as that might violate the ACT-STBY configuration and render the node out of service.
As an extension of the 1+1 ACT-STBY resilience pattern, a STBY instance can act as backup to N ACT nodes (N+1). In this case, the basic information flow remains the same, i.e., the consumer is informed of a failure in order to activate the STBY node. However, in this case it might be useful for the failure notification to cover a number of failed instances due to the same fault (e.g., more than one instance might be affected by a switch failure). The reaction of the consumer might depend on whether only one active instance has failed (similar to the ACT-STBY case), or if more active instances are needed as well.
2.1.2. Preventive actions based on fault prediction¶
The fault management scenario explained in Fault management using ACT-STBY configuration can also be performed based on fault prediction. In such cases, in VIM, there is an intelligent fault prediction module which, based on its NFVI monitoring information, can predict an imminent fault in the elements of NFVI. A simple example is raising temperature of a Hardware Server which might trigger a pre-emptive recovery action. The requirements of such fault prediction in the VIM are investigated in the OPNFV project “Data Collection for Failure Prediction” [PRED].
This use case is very similar to Fault management using ACT-STBY configuration. Instead of a fault detection (Step 1 “Fault Notification in” Fig. 2.1), the trigger comes from a fault prediction module in the VIM, or from a third party module which notifies the VIM about an imminent fault. From Step 2~5, the work flow is the same as in the “Fault management using ACT-STBY configuration” use case, except in this case, the Consumer of a VM/VNF switches to STBY configuration based on a predicted fault, rather than an occurred fault.
2.2. NVFI Maintenance¶
2.2.1. VM Retirement¶
All network operators perform maintenance of their network infrastructure, both regularly and irregularly. Besides the hardware, virtualization is expected to increase the number of elements subject to such maintenance as NFVI holds new elements like the hypervisor and host OS. Maintenance of a particular resource element e.g. hardware, hypervisor etc. may render a particular server hardware unusable until the maintenance procedure is complete.
However, the Consumer of VMs needs to know that such resources will be unavailable because of NFVI maintenance. The following use case is again to ensure that the ACT-STBY configuration is not violated. A stand-alone action (e.g. live migration) from VIM/OpenStack to empty a physical machine so that consequent maintenance procedure could be performed may not only violate the ACT-STBY configuration, but also have impact on real-time processing scenarios where dedicated resources to virtual resources (e.g. VMs) are necessary and a pause in operation (e.g. vCPU) is not allowed. The Consumer is in a position to safely perform the switch between ACT and STBY nodes, or switch to an alternative VNF forwarding graph so the hardware servers hosting the ACT nodes can be emptied for the upcoming maintenance operation. Once the target hardware servers are emptied (i.e. no virtual resources are running on top), the VIM can mark them with an appropriate flag (i.e. “maintenance” state) such that these servers are not considered for hosting of virtual machines until the maintenance flag is cleared (i.e. nodes are back in “normal” status).
A high-level view of the maintenance procedure is presented in Fig. 2.2. VIM/OpenStack, through its northbound interface, receives a maintenance notification (Step 1 “Maintenance Request”) from the Administrator (e.g. a network operator) including information about which hardware is subject to maintenance. Maintenance operations include replacement/upgrade of hardware, update/upgrade of the hypervisor/host OS, etc.
The consequent steps to enable the Consumer to perform ACT-STBY switching are very similar to the fault management scenario. From VIM/OpenStack’s internal database, it finds out which virtual resources (VM-x) are running on those particular Hardware Servers and who are the managers of those virtual resources (Step 2). The VIM then informs the respective Consumer (VNFMs or NFVO) in Step 3 “Maintenance Notification”. Based on this, the Consumer takes necessary actions (Step 4, e.g. switch to STBY configuration or switch VNF forwarding graphs) and then notifies (Step 5 “Instruction”) the VIM. Upon receiving such notification, the VIM takes necessary actions (Step 6 “Execute Instruction” to empty the Hardware Servers so that consequent maintenance operations could be performed. Due to the similarity for Steps 2~6, the maintenance procedure and the fault management procedure are investigated in the same project.
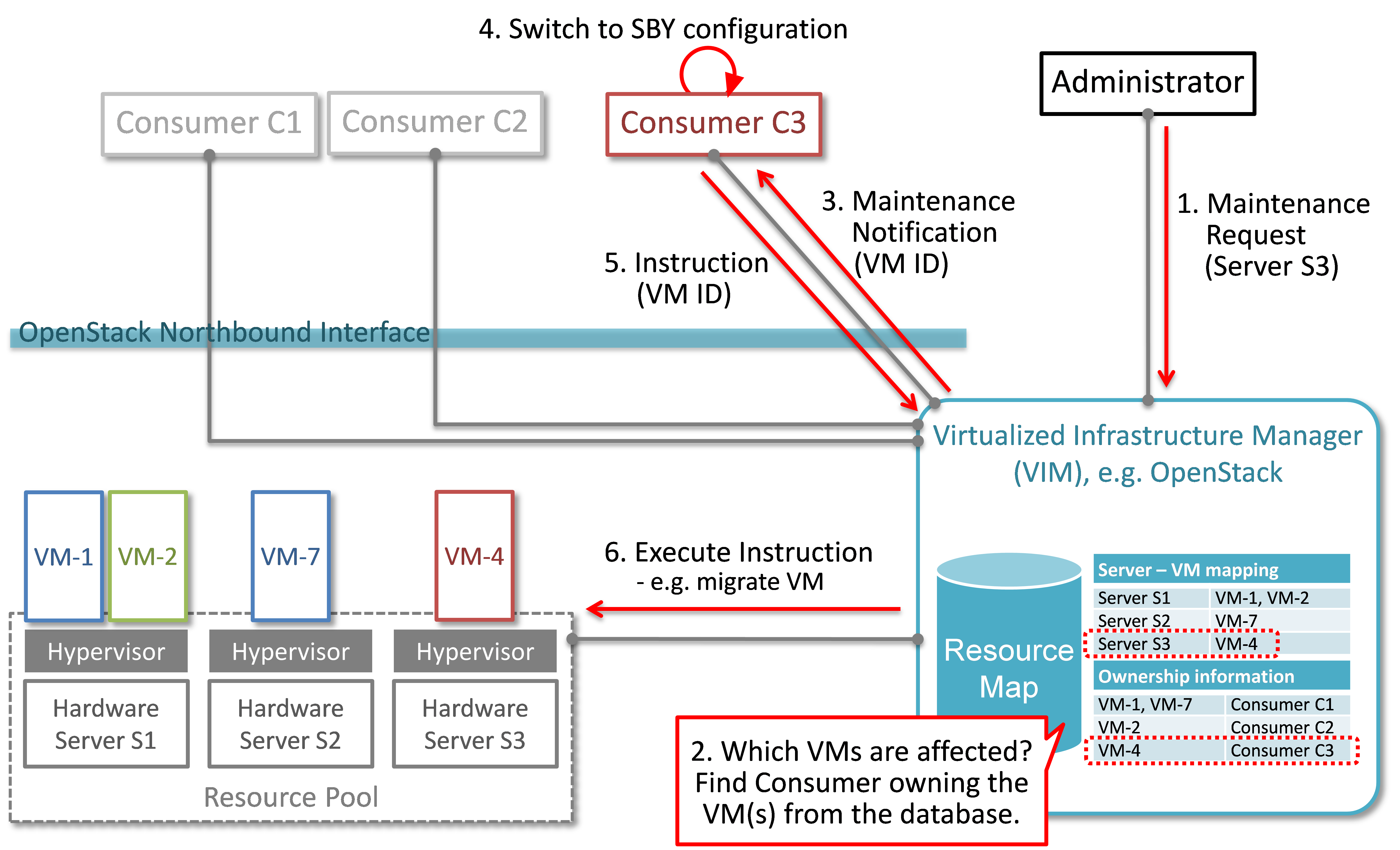
Maintenance use case¶
3. High level architecture and general features¶
3.1. Functional overview¶
The Doctor project circles around two distinct use cases: 1) management of failures of virtualized resources and 2) planned maintenance, e.g. migration, of virtualized resources. Both of them may affect a VNF/application and the network service it provides, but there is a difference in frequency and how they can be handled.
Failures are spontaneous events that may or may not have an impact on the virtual resources. The Consumer should as soon as possible react to the failure, e.g., by switching to the STBY node. The Consumer will then instruct the VIM on how to clean up or repair the lost virtual resources, i.e. restore the VM, VLAN or virtualized storage. How much the applications are affected varies. Applications with built-in HA support might experience a short decrease in retainability (e.g. an ongoing session might be lost) while keeping availability (establishment or re-establishment of sessions are not affected), whereas the impact on applications without built-in HA may be more serious. How much the network service is impacted depends on how the service is implemented. With sufficient network redundancy the service may be unaffected even when a specific resource fails.
On the other hand, planned maintenance impacting virtualized resources are events that are known in advance. This group includes e.g. migration due to software upgrades of OS and hypervisor on a compute host. Some of these might have been requested by the application or its management solution, but there is also a need for coordination on the actual operations on the virtual resources. There may be an impact on the applications and the service, but since they are not spontaneous events there is room for planning and coordination between the application management organization and the infrastructure management organization, including performing whatever actions that would be required to minimize the problems.
Failure prediction is the process of pro-actively identifying situations that may lead to a failure in the future unless acted on by means of maintenance activities. From applications’ point of view, failure prediction may impact them in two ways: either the warning time is so short that the application or its management solution does not have time to react, in which case it is equal to the failure scenario, or there is sufficient time to avoid the consequences by means of maintenance activities, in which case it is similar to planned maintenance.
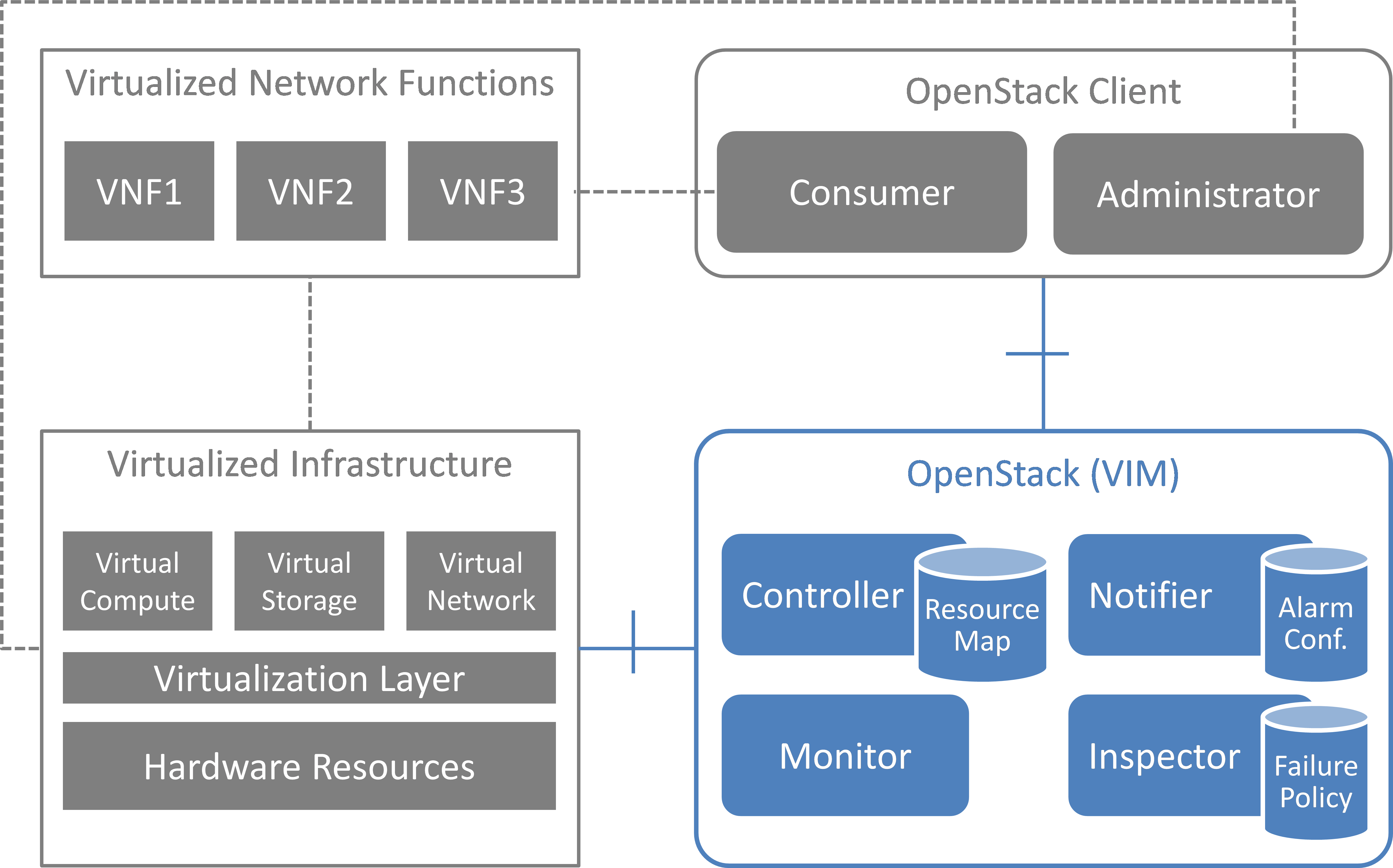
3.2. Architecture Overview¶
NFV and the Cloud platform provide virtual resources and related control functionality to users and administrators. Fig. 3.1 shows the high level architecture of NFV focusing on the NFVI, i.e., the virtualized infrastructure. The NFVI provides virtual resources, such as virtual machines (VM) and virtual networks. Those virtual resources are used to run applications, i.e. VNFs, which could be components of a network service which is managed by the consumer of the NFVI. The VIM provides functionalities of controlling and viewing virtual resources on hardware (physical) resources to the consumers, i.e., users and administrators. OpenStack is a prominent candidate for this VIM. The administrator may also directly control the NFVI without using the VIM.
Although OpenStack is the target upstream project where the new functional elements (Controller, Notifier, Monitor, and Inspector) are expected to be implemented, a particular implementation method is not assumed. Some of these elements may sit outside of OpenStack and offer a northbound interface to OpenStack.
3.3. General Features and Requirements¶
The following features are required for the VIM to achieve high availability of applications (e.g., MME, S/P-GW) and the Network Services:
- Monitoring: Monitor physical and virtual resources.
- Detection: Detect unavailability of physical resources.
- Correlation and Cognition: Correlate faults and identify affected virtual resources.
- Notification: Notify unavailable virtual resources to their Consumer(s).
- Fencing: Shut down or isolate a faulty resource.
- Recovery action: Execute actions to process fault recovery and maintenance.
The time interval between the instant that an event is detected by the monitoring system and the Consumer notification of unavailable resources shall be < 1 second (e.g., Step 1 to Step 4 in Fig. 3.2).
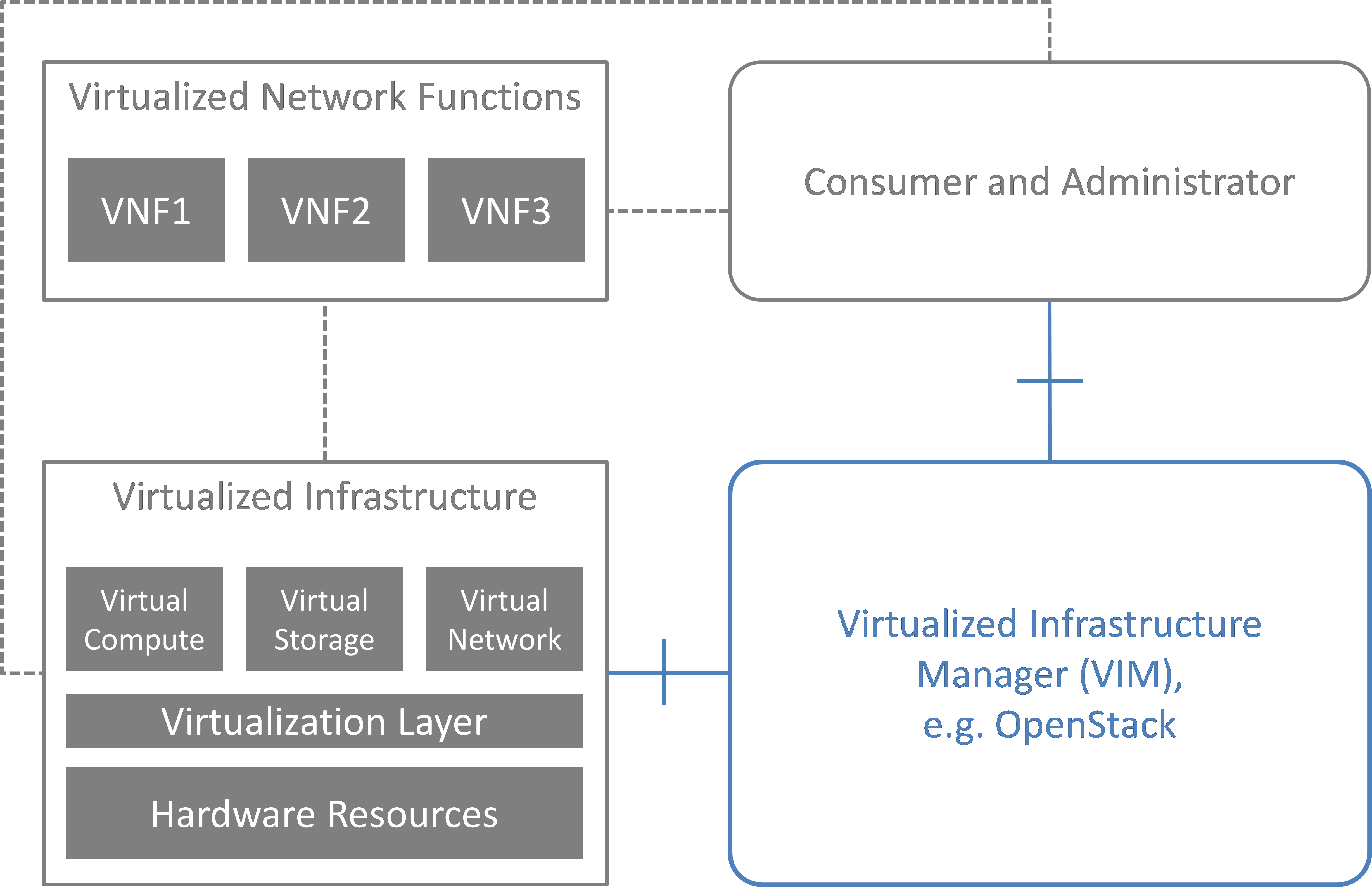
High level architecture¶
3.3.1. Monitoring¶
The VIM shall monitor physical and virtual resources for unavailability and suspicious behavior.
3.3.2. Detection¶
The VIM shall detect unavailability and failures of physical resources that might cause errors/faults in virtual resources running on top of them. Unavailability of physical resource is detected by various monitoring and managing tools for hardware and software components. This may include also predicting upcoming faults. Note, fault prediction is out of scope of this project and is investigated in the OPNFV “Data Collection for Failure Prediction” project [PRED].
The fault items/events to be detected shall be configurable.
The configuration shall enable Failure Selection and Aggregation. Failure aggregation means the VIM determines unavailability of physical resource from more than two non-critical failures related to the same resource.
There are two types of unavailability - immediate and future:
- Immediate unavailability can be detected by setting traps of raw failures on hardware monitoring tools.
- Future unavailability can be found by receiving maintenance instructions issued by the administrator of the NFVI or by failure prediction mechanisms.
3.3.3. Correlation and Cognition¶
The VIM shall correlate each fault to the impacted virtual resource, i.e., the VIM shall identify unavailability of virtualized resources that are or will be affected by failures on the physical resources under them. Unavailability of a virtualized resource is determined by referring to the mapping of physical and virtualized resources.
VIM shall allow configuration of fault correlation between physical and virtual resources. VIM shall support correlating faults:
- between a physical resource and another physical resource
- between a physical resource and a virtual resource
- between a virtual resource and another virtual resource
Failure aggregation is also required in this feature, e.g., a user may request to be only notified if failures on more than two standby VMs in an (N+M) deployment model occurred.
3.3.4. Notification¶
The VIM shall notify the alarm, i.e., unavailability of virtual resource(s), to the Consumer owning it over the northbound interface, such that the Consumers impacted by the failure can take appropriate actions to recover from the failure.
The VIM shall also notify the unavailability of physical resources to its Administrator.
All notifications shall be transferred immediately in order to minimize the stalling time of the network service and to avoid over assignment caused by delay of capability updates.
There may be multiple consumers, so the VIM has to find out the owner of a faulty resource. Moreover, there may be a large number of virtual and physical resources in a real deployment, so polling the state of all resources to the VIM would lead to heavy signaling traffic. Thus, a publication/subscription messaging model is better suited for these notifications, as notifications are only sent to subscribed consumers.
Notifications will be send out along with the configuration by the consumer. The configuration includes endpoint(s) in which the consumers can specify multiple targets for the notification subscription, so that various and multiple receiver functions can consume the notification message. Also, the conditions for notifications shall be configurable, such that the consumer can set according policies, e.g. whether it wants to receive fault notifications or not.
Note: the VIM should only accept notification subscriptions for each resource by its owner or administrator. Notifications to the Consumer about the unavailability of virtualized resources will include a description of the fault, preferably with sufficient abstraction rather than detailed physical fault information.
3.3.5. Fencing¶
Recovery actions, e.g. safe VM evacuation, have to be preceded by fencing the failed host. Fencing hereby means to isolate or shut down a faulty resource. Without fencing – when the perceived disconnection is due to some transient or partial failure – the evacuation might lead into two identical instances running together and having a dangerous conflict.
There is a cross-project definition in OpenStack of how to implement fencing, but there has not been any progress. The general description is available here: https://wiki.openstack.org/wiki/Fencing_Instances_of_an_Unreachable_Host
As OpenStack does not cover fencing it is in the responsibility of the Doctor project to make sure fencing is done by using tools like pacemaker and by calling OpenStack APIs. Only after fencing is done OpenStack resources can be marked as down. In case there are gaps in OpenStack projects to have all relevant resources marked as down, those gaps need to be identified and fixed. The Doctor Inspector component will be responsible of marking resources down in the OpenStack and back up if necessary.
3.3.6. Recovery Action¶
In the basic Fault management using ACT-STBY configuration use case, no automatic actions will be taken by the VIM, but all recovery actions executed by the VIM and the NFVI will be instructed and coordinated by the Consumer.
In a more advanced use case, the VIM shall be able to recover the failed virtual resources according to a pre-defined behavior for that resource. In principle this means that the owner of the resource (i.e., its consumer or administrator) can define which recovery actions shall be taken by the VIM. Examples are a restart of the VM, migration/evacuation of the VM, or no action.
3.4. High level northbound interface specification¶
3.4.1. Fault management¶
This interface allows the Consumer to subscribe to fault notification from the VIM. Using a filter, the Consumer can narrow down which faults should be notified. A fault notification may trigger the Consumer to switch from ACT to STBY configuration and initiate fault recovery actions. A fault query request/response message exchange allows the Consumer to find out about active alarms at the VIM. A filter can be used to narrow down the alarms returned in the response message.

High-level message flow for fault management¶
The high level message flow for the fault management use case is shown in Fig. 3.2. It consists of the following steps:
- The VIM monitors the physical and virtual resources and the fault management workflow is triggered by a monitored fault event.
- Event correlation, fault detection and aggregation in VIM. Note: this may also happen after Step 3.
- Database lookup to find the virtual resources affected by the detected fault.
- Fault notification to Consumer.
- The Consumer switches to standby configuration (STBY).
- Instructions to VIM requesting certain actions to be performed on the affected resources, for example migrate/update/terminate specific resource(s). After reception of such instructions, the VIM is executing the requested action, e.g., it will migrate or terminate a virtual resource.
3.4.2. NFVI Maintenance¶
The NFVI maintenance interface allows the Administrator to notify the VIM about a planned maintenance operation on the NFVI. A maintenance operation may for example be an update of the server firmware or the hypervisor. The MaintenanceRequest message contains instructions to change the state of the physical resource from ‘enabled’ to ‘going-to-maintenance’ and a timeout [1]. After receiving the MaintenanceRequest,the VIM decides on the actions to be taken based on maintenance policies predefined by the affected Consumer(s).
| [1] | Timeout is set by the Administrator and corresponds to the maximum time to empty the physical resources. |

High-level message flow for maintenance policy enforcement¶
The high level message flow for the NFVI maintenance policy enforcement is shown in Fig. 3.3. It consists of the following steps:
- Maintenance trigger received from Administrator.
- VIM switches the affected physical resources to “going-to-maintenance” state e.g. so that no new VM will be scheduled on the physical servers.
- Database lookup to find the Consumer(s) and virtual resources affected by the maintenance operation.
- Maintenance policies are enforced in the VIM, e.g. affected VM(s) are shut down on the physical server(s), or affected Consumer(s) are notified about the planned maintenance operation (steps 4a/4b).
Once the affected Consumer(s) have been notified, they take specific actions (e.g. switch to standby (STBY) configuration, request to terminate the virtual resource(s)) to allow the maintenance action to be executed. After the physical resources have been emptied, the VIM puts the physical resources in “in-maintenance” state and sends a MaintenanceResponse back to the Administrator.

Successful NFVI maintenance¶
The high level message flow for a successful NFVI maintenance is show in Fig. 3.4. It consists of the following steps:
- The Consumer C3 switches to standby configuration (STBY).
- Instructions from Consumers C2/C3 are shared to VIM requesting certain actions to be performed (steps 6a, 6b). After receiving such instructions, the VIM executes the requested action in order to empty the physical resources (step 6c) and informs the Consumer about the result of the actions (steps 6d, 6e).
- The VIM switches the physical resources to “in-maintenance” state
- Maintenance response is sent from VIM to inform the Administrator that the physical servers have been emptied.
- The Administrator is coordinating and executing the maintenance operation/work on the NFVI. Note: this step is out of scope of Doctor project.
The requested actions to empty the physical resources may not be successful (e.g. migration fails or takes too long) and in such a case, the VIM puts the physical resources back to ‘enabled’ and informs the Administrator about the problem.
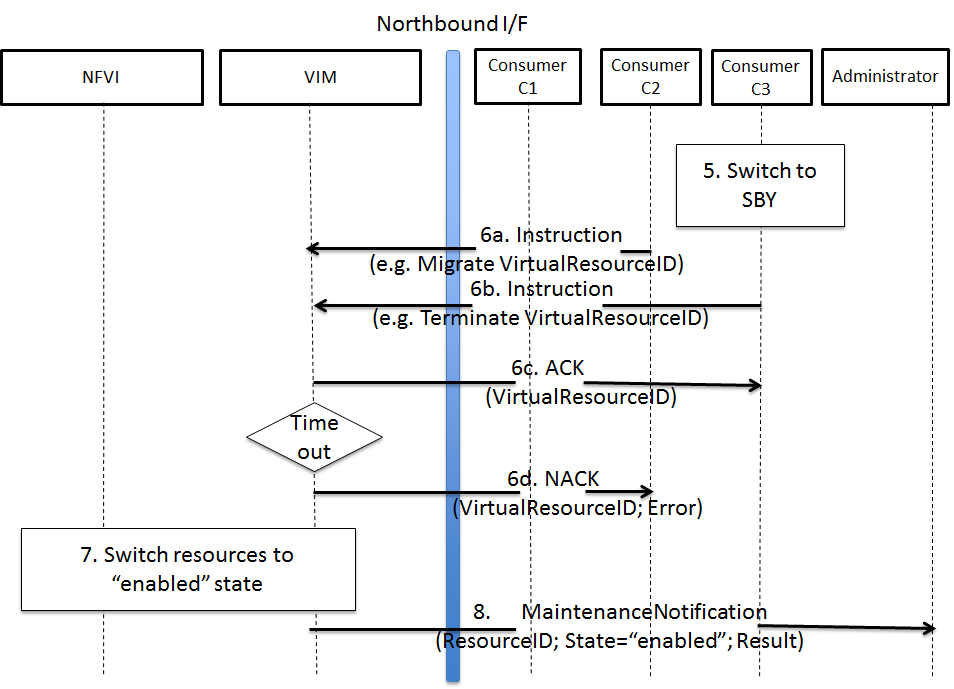
Example of failed NFVI maintenance¶
An example of a high level message flow to cover the failed NFVI maintenance case is shown in Fig. 3.5. It consists of the following steps:
- The Consumer C3 switches to standby configuration (STDBY).
- Instructions from Consumers C2/C3 are shared to VIM requesting certain actions to be performed (steps 6a, 6b). The VIM executes the requested actions and sends back a NACK to consumer C2 (step 6d) as the migration of the virtual resource(s) is not completed by the given timeout.
- The VIM switches the physical resources to “enabled” state.
- MaintenanceResponse is sent from VIM to inform the Administrator that the maintenance action cannot start.
4. Gap analysis in upstream projects¶
This section presents the findings of gaps on existing VIM platforms. The focus was to identify gaps based on the features and requirements specified in Section 3.3. The analysis work determined gaps that are presented here.
4.1. VIM Northbound Interface¶
4.1.1. Immediate Notification¶
- Type: ‘deficiency in performance’
- Description
- To-be
- VIM has to notify unavailability of virtual resource (fault) to VIM user immediately.
- Notification should be passed in ‘1 second’ after fault detected/notified by VIM.
- Also, the following conditions/requirement have to be met:
- Only the owning user can receive notification of fault related to owned virtual resource(s).
- As-is
- OpenStack Metering ‘Ceilometer’ can notify unavailability of virtual
resource (fault) to the owner of virtual resource based on alarm
configuration by the user.
- Ceilometer Alarm API: http://docs.openstack.org/developer/ceilometer/webapi/v2.html#alarms
- Alarm notifications are triggered by alarm evaluator instead of
notification agents that might receive faults
- Ceilometer Architecture: http://docs.openstack.org/developer/ceilometer/architecture.html#id1
- Evaluation interval should be equal to or larger than configured pipeline interval for collection of underlying metrics.
- The interval for collection has to be set large enough which depends on the size of the deployment and the number of metrics to be collected.
- The interval may not be less than one second in even small deployments. The default value is 60 seconds.
- Alternative: OpenStack has a message bus to publish system events. The operator can allow the user to connect this, but there are no functions to filter out other events that should not be passed to the user or which were not requested by the user.
- OpenStack Metering ‘Ceilometer’ can notify unavailability of virtual
resource (fault) to the owner of virtual resource based on alarm
configuration by the user.
- Gap
- Fault notifications cannot be received immediately by Ceilometer.
- To-be
4.1.2. Maintenance Notification¶
- Type: ‘missing’
- Description
- To-be
- VIM has to notify unavailability of virtual resource triggered by NFVI maintenance to VIM user.
- Also, the following conditions/requirements have to be met:
- VIM should accept maintenance message from administrator and mark target physical resource “in maintenance”.
- Only the owner of virtual resource hosted by target physical resource can receive the notification that can trigger some process for applications which are running on the virtual resource (e.g. cut off VM).
- As-is
- OpenStack: None
- AWS (just for study)
- AWS provides API and CLI to view status of resource (VM) and to create instance status and system status alarms to notify you when an instance has a failed status check. http://docs.aws.amazon.com/AWSEC2/latest/UserGuide/monitoring-instances-status-check_sched.html
- AWS provides API and CLI to view scheduled events, such as a reboot or retirement, for your instances. Also, those events will be notified via e-mail. http://docs.aws.amazon.com/AWSEC2/latest/UserGuide/monitoring-system-instance-status-check.html
- Gap
- VIM user cannot receive maintenance notifications.
- To-be
- Related blueprints
4.2. VIM Southbound interface¶
4.2.1. Normalization of data collection models¶
- Type: ‘missing’
- Description
- To-be
- A normalized data format needs to be created to cope with the many data models from different monitoring solutions.
- As-is
- Data can be collected from many places (e.g. Zabbix, Nagios, Cacti, Zenoss). Although each solution establishes its own data models, no common data abstraction models exist in OpenStack.
- Gap
- Normalized data format does not exist.
- To-be
4.3. OpenStack¶
4.3.1. Ceilometer¶
OpenStack offers a telemetry service, Ceilometer, for collecting measurements of the utilization of physical and virtual resources [CEIL]. Ceilometer can collect a number of metrics across multiple OpenStack components and watch for variations and trigger alarms based upon the collected data.
4.3.1.1. Scalability of fault aggregation¶
- Type: ‘scalability issue’
- Description
- To-be
- Be able to scale to a large deployment, where thousands of monitoring events per second need to be analyzed.
- As-is
- Performance issue when scaling to medium-sized deployments.
- Gap
- Ceilometer seems to be unsuitable for monitoring medium and large scale NFVI deployments.
- To-be
- Related blueprints
- Usage of Zabbix for fault aggregation [ZABB]. Zabbix can support a much higher number of fault events (up to 15 thousand events per second, but obviously also has some upper bound: http://blog.zabbix.com/scalable-zabbix-lessons-on-hitting-9400-nvps/2615/
- Decentralized/hierarchical deployment with multiple instances, where one instance is only responsible for a small NFVI.
4.3.1.2. Monitoring of hardware and software¶
Type: ‘missing (lack of functionality)’
Description
- To-be
- OpenStack (as VIM) should monitor various hardware and software in NFVI to handle faults on them by Ceilometer.
- OpenStack may have monitoring functionality in itself and can be integrated with third party monitoring tools.
- OpenStack need to be able to detect the faults listed in the Annex.
- As-is
- For each deployment of OpenStack, an operator has responsibility to configure monitoring tools with relevant scripts or plugins in order to monitor hardware and software.
- OpenStack Ceilometer does not monitor hardware and software to capture faults.
- Gap
- Ceilometer is not able to detect and handle all faults listed in the Annex.
- To-be
Related blueprints / workarounds
- Use other dedicated monitoring tools like Zabbix or Monasca
4.3.2. Nova¶
OpenStack Nova [NOVA] is a mature and widely known and used component in OpenStack cloud deployments. It is the main part of an “infrastructure-as-a-service” system providing a cloud computing fabric controller, supporting a wide diversity of virtualization and container technologies.
Nova has proven throughout these past years to be highly available and fault-tolerant. Featuring its own API, it also provides a compatibility API with Amazon EC2 APIs.
4.3.2.1. Correct states when compute host is down¶
- Type: ‘missing (lack of functionality)’
- Description
- To-be
- There needs to be API to change VM power_State in case host has failed.
- There needs to be API to change nova-compute state.
- There could be single API to change different VM states for all VMs belonging to specific host.
- As external system monitoring the infra calls these APIs change can be fast and reliable.
- Correlation actions can be faster and automated as states are reliable.
- User will be able to read states from OpenStack and trust they are correct.
- As-is
- When a VM goes down due to a host HW, host OS or hypervisor failure, nothing happens in OpenStack. The VMs of a crashed host/hypervisor are reported to be live and OK through the OpenStack API.
- nova-compute state might change too slowly or the state is not reliable if expecting also VMs to be down. This leads to ability to schedule VMs to a failed host and slowness blocks evacuation.
- Gap
- OpenStack does not change its states fast and reliably enough.
- There is API missing to have external system to change states and to trust the states are then reliable (external system has fenced failed host).
- User cannot read all the states from OpenStack nor trust they are right.
- To-be
- Related blueprints
4.3.2.2. Evacuate VMs in Maintenance mode¶
- Type: ‘missing’
- Description
- To-be
- When maintenance mode for a compute host is set, trigger VM evacuation to available compute nodes before bringing the host down for maintenance.
- As-is
- If setting a compute node to a maintenance mode, OpenStack only schedules evacuation of all VMs to available compute nodes if in-maintenance compute node runs the XenAPI and VMware ESX hypervisors. Other hypervisors (e.g. KVM) are not supported and, hence, guest VMs will likely stop running due to maintenance actions administrator may perform (e.g. hardware upgrades, OS updates).
- Gap
- Nova libvirt hypervisor driver does not implement automatic guest VMs
evacuation when compute nodes are set to maintenance mode (
$ nova host-update --maintenance enable <hostname>).
- Nova libvirt hypervisor driver does not implement automatic guest VMs
evacuation when compute nodes are set to maintenance mode (
- To-be
4.3.3. Monasca¶
Monasca is an open-source monitoring-as-a-service (MONaaS) solution that integrates with OpenStack. Even though it is still in its early days, it is the interest of the community that the platform be multi-tenant, highly scalable, performant and fault-tolerant. It provides a streaming alarm engine, a notification engine, and a northbound REST API users can use to interact with Monasca. Hundreds of thousands of metrics per second can be processed [MONA].
4.3.3.1. Anomaly detection¶
- Type: ‘missing (lack of functionality)’
- Description
- To-be
- Detect the failure and perform a root cause analysis to filter out other alarms that may be triggered due to their cascading relation.
- As-is
- A mechanism to detect root causes of failures is not available.
- Gap
- Certain failures can trigger many alarms due to their dependency on the underlying root cause of failure. Knowing the root cause can help filter out unnecessary and overwhelming alarms.
- To-be
- Related blueprints / workarounds
- Monasca as of now lacks this feature, although the community is aware and working toward supporting it.
4.3.3.2. Sensor monitoring¶
- Type: ‘missing (lack of functionality)’
- Description
- To-be
- It should support monitoring sensor data retrieval, for instance, from IPMI.
- As-is
- Monasca does not monitor sensor data
- Gap
- Sensor monitoring is very important. It provides operators status on the state of the physical infrastructure (e.g. temperature, fans).
- To-be
- Related blueprints / workarounds
- Monasca can be configured to use third-party monitoring solutions (e.g. Nagios, Cacti) for retrieving additional data.
4.4. Hardware monitoring tools¶
4.4.1. Zabbix¶
Zabbix is an open-source solution for monitoring availability and performance of infrastructure components (i.e. servers and network devices), as well as applications [ZABB]. It can be customized for use with OpenStack. It is a mature tool and has been proven to be able to scale to large systems with 100,000s of devices.
4.4.1.1. Delay in execution of actions¶
- Type: ‘deficiency in performance’
- Description
- To-be
- After detecting a fault, the monitoring tool should immediately execute the appropriate action, e.g. inform the manager through the NB I/F
- As-is
- A delay of around 10 seconds was measured in two independent testbed deployments
- Gap
- Cause of the delay needs to be identified and fixed
- To-be
5. Detailed architecture and interface specification¶
This section describes a detailed implementation plan, which is based on the high level architecture introduced in Section 3. Section 5.1 describes the functional blocks of the Doctor architecture, which is followed by a high level message flow in Section 5.2. Section 5.3 provides a mapping of selected existing open source components to the building blocks of the Doctor architecture. Thereby, the selection of components is based on their maturity and the gap analysis executed in Section 4. Sections 5.4 and 5.5 detail the specification of the related northbound interface and the related information elements. Finally, Section 5.6 provides a first set of blueprints to address selected gaps required for the realization functionalities of the Doctor project.
5.1. Functional Blocks¶
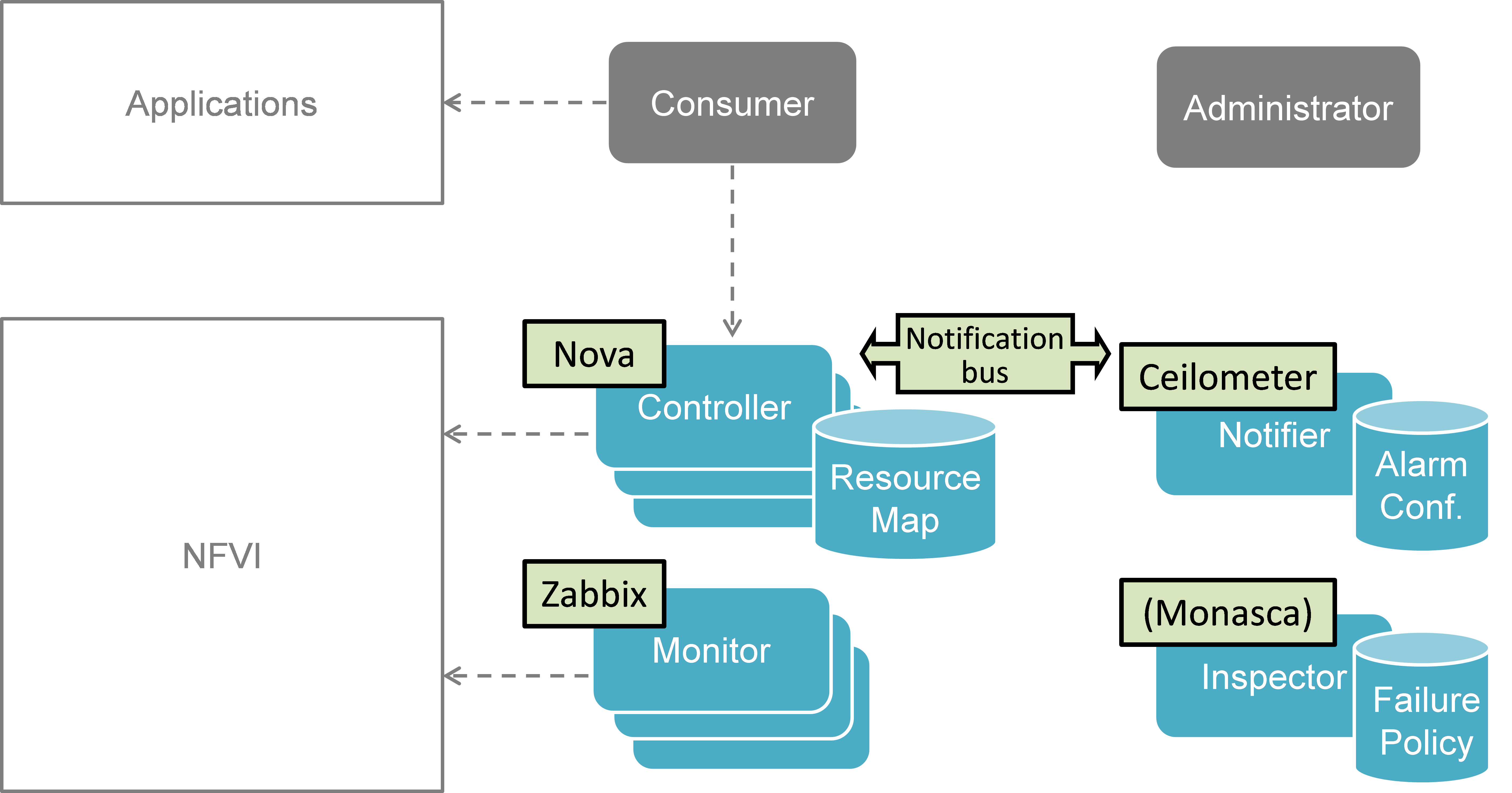
This section introduces the functional blocks to form the VIM. OpenStack was selected as the candidate for implementation. Inside the VIM, 4 different building blocks are defined (see Fig. 5.1).
Functional blocks¶
5.1.1. Monitor¶
The Monitor module has the responsibility for monitoring the virtualized infrastructure. There are already many existing tools and services (e.g. Zabbix) to monitor different aspects of hardware and software resources which can be used for this purpose.
5.1.2. Inspector¶
The Inspector module has the ability a) to receive various failure notifications regarding physical resource(s) from Monitor module(s), b) to find the affected virtual resource(s) by querying the resource map in the Controller, and c) to update the state of the virtual resource (and physical resource).
The Inspector has drivers for different types of events and resources to integrate any type of Monitor and Controller modules. It also uses a failure policy database to decide on the failure selection and aggregation from raw events. This failure policy database is configured by the Administrator.
The reason for separation of the Inspector and Controller modules is to make the Controller focus on simple operations by avoiding a tight integration of various health check mechanisms into the Controller.
5.1.3. Controller¶
The Controller is responsible for maintaining the resource map (i.e. the mapping from physical resources to virtual resources), accepting update requests for the resource state(s) (exposing as provider API), and sending all failure events regarding virtual resources to the Notifier. Optionally, the Controller has the ability to force the state of a given physical resource to down in the resource mapping when it receives failure notifications from the Inspector for that given physical resource. The Controller also re-calculates the capacity of the NVFI when receiving a failure notification for a physical resource.
In a real-world deployment, the VIM may have several controllers, one for each resource type, such as Nova, Neutron and Cinder in OpenStack. Each controller maintains a database of virtual and physical resources which shall be the master source for resource information inside the VIM.
5.1.4. Notifier¶
The focus of the Notifier is on selecting and aggregating failure events received from the controller based on policies mandated by the Consumer. Therefore, it allows the Consumer to subscribe for alarms regarding virtual resources using a method such as API endpoint. After receiving a fault event from a Controller, it will notify the fault to the Consumer by referring to the alarm configuration which was defined by the Consumer earlier on.
To reduce complexity of the Controller, it is a good approach for the Controllers to emit all notifications without any filtering mechanism and have another service (i.e. Notifier) handle those notifications properly. This is the general philosophy of notifications in OpenStack. Note that a fault message consumed by the Notifier is different from the fault message received by the Inspector; the former message is related to virtual resources which are visible to users with relevant ownership, whereas the latter is related to raw devices or small entities which should be handled with an administrator privilege.
The northbound interface between the Notifier and the Consumer/Administrator is specified in Detailed northbound interface specification.
5.2. Sequence¶
5.2.1. Fault Management¶
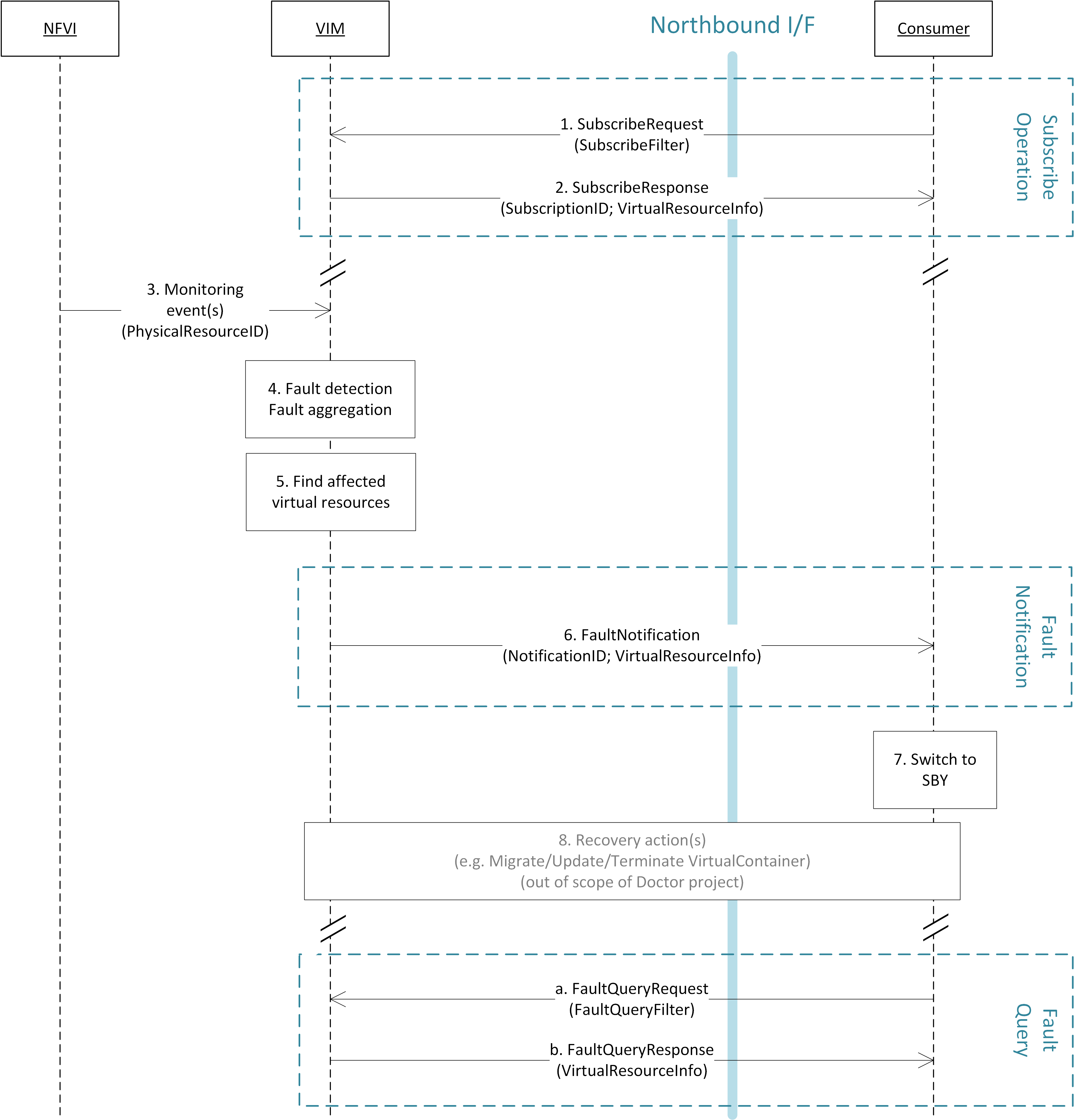
The detailed work flow for fault management is as follows (see also Fig. 5.2):
- Request to subscribe to monitor specific virtual resources. A query filter can be used to narrow down the alarms the Consumer wants to be informed about.
- Each subscription request is acknowledged with a subscribe response message. The response message contains information about the subscribed virtual resources, in particular if a subscribed virtual resource is in “alarm” state.
- The NFVI sends monitoring events for resources the VIM has been subscribed to. Note: this subscription message exchange between the VIM and NFVI is not shown in this message flow.
- Event correlation, fault detection and aggregation in VIM.
- Database lookup to find the virtual resources affected by the detected fault.
- Fault notification to Consumer.
- The Consumer switches to standby configuration (STBY)
- Instructions to VIM requesting certain actions to be performed on the affected resources, for example migrate/update/terminate specific resource(s). After reception of such instructions, the VIM is executing the requested action, e.g. it will migrate or terminate a virtual resource.
- Query request from Consumer to VIM to get information about the current status of a resource.
- Response to the query request with information about the current status of the queried resource. In case the resource is in “fault” state, information about the related fault(s) is returned.
In order to allow for quick reaction to failures, the time interval between fault detection in step 3 and the corresponding recovery actions in step 7 and 8 shall be less than 1 second.
Fault management work flow¶
Fault management scenario¶
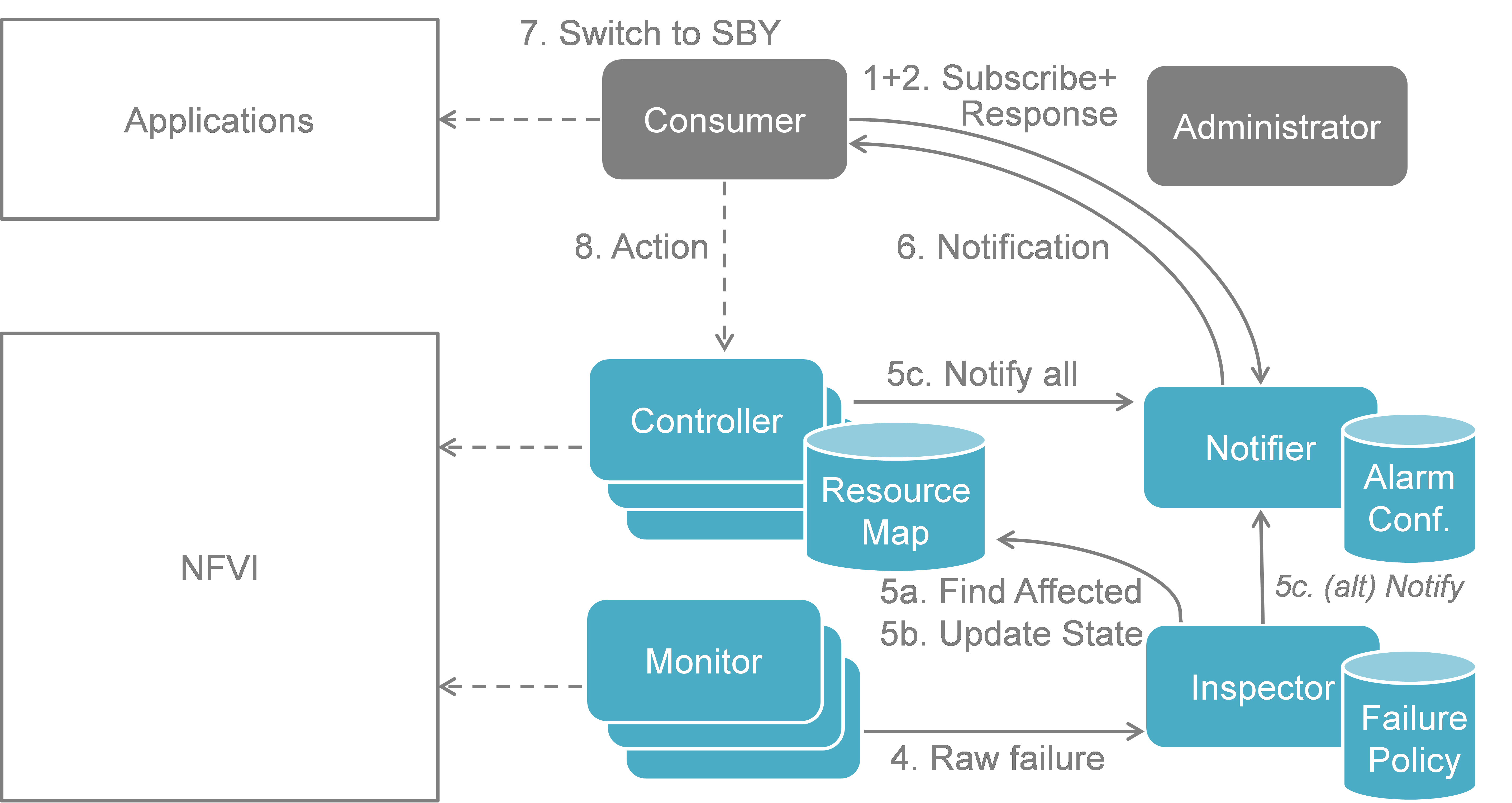
Fig. 5.3 shows a more detailed message flow (Steps 4 to 6) between the 4 building blocks introduced in Functional Blocks.
- The Monitor observed a fault in the NFVI and reports the raw fault to the Inspector. The Inspector filters and aggregates the faults using pre-configured failure policies.
- a) The Inspector queries the Resource Map to find the virtual resources affected by the raw fault in the NFVI. b) The Inspector updates the state of the affected virtual resources in the Resource Map. c) The Controller observes a change of the virtual resource state and informs the Notifier about the state change and the related alarm(s). Alternatively, the Inspector may directly inform the Notifier about it.
- The Notifier is performing another filtering and aggregation of the changes and alarms based on the pre-configured alarm configuration. Finally, a fault notification is sent to northbound to the Consumer.
5.2.2. NFVI Maintenance¶

NFVI maintenance work flow¶
The detailed work flow for NFVI maintenance is shown in Fig. 5.4 and has the following steps. Note that steps 1, 2, and 5 to 8a in the NFVI maintenance work flow are very similar to the steps in the fault management work flow and share a similar implementation plan in Release 1.
- Subscribe to fault/maintenance notifications.
- Response to subscribe request.
- Maintenance trigger received from administrator.
- VIM switches NFVI resources to “maintenance” state. This, e.g., means they should not be used for further allocation/migration requests
- Database lookup to find the virtual resources affected by the detected maintenance operation.
- Maintenance notification to Consumer.
- The Consumer switches to standby configuration (STBY)
- Instructions from Consumer to VIM requesting certain recovery actions to be performed (step 8a). After reception of such instructions, the VIM is executing the requested action in order to empty the physical resources (step 8b).
- Maintenance response from VIM to inform the Administrator that the physical machines have been emptied (or the operation resulted in an error state).
- Administrator is coordinating and executing the maintenance operation/work on the NFVI.
- Query request from Administrator to VIM to get information about the current state of a resource.
- Response to the query request with information about the current state of the queried resource(s). In case the resource is in “maintenance” state, information about the related maintenance operation is returned.
NFVI Maintenance implementation plan¶
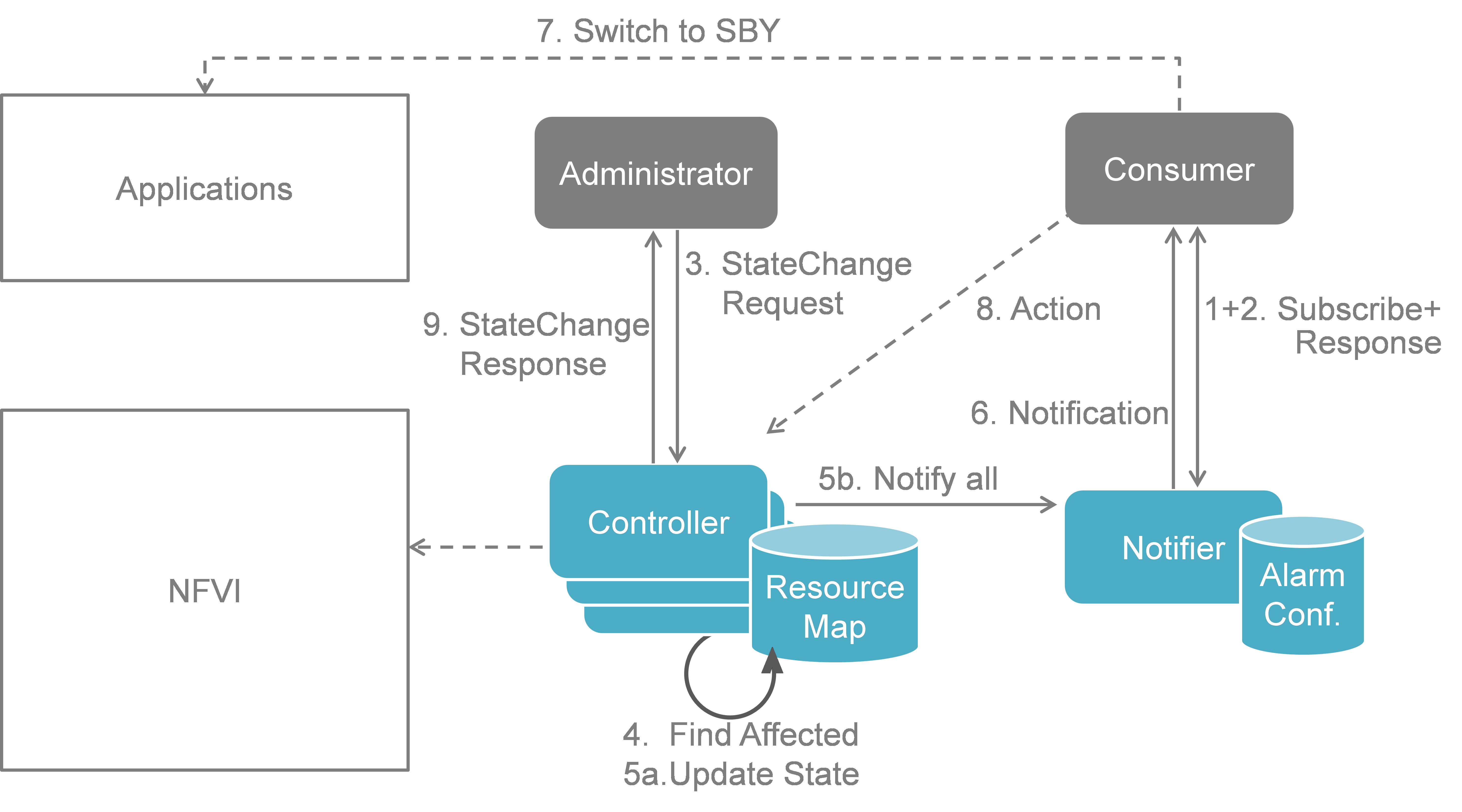
Fig. 5.5 shows a more detailed message flow (Steps 3 to 6 and 9) between the 4 building blocks introduced in Section 5.1..
The Administrator is sending a StateChange request to the Controller residing in the VIM.
The Controller queries the Resource Map to find the virtual resources affected by the planned maintenance operation.
a) The Controller updates the state of the affected virtual resources in the Resource Map database.
b) The Controller informs the Notifier about the virtual resources that will be affected by the maintenance operation.
A maintenance notification is sent to northbound to the Consumer.
...
- The Controller informs the Administrator after the physical resources have been freed.
5.3. Implementation plan for OPNFV Release 1¶
5.3.1. Fault management¶
Fig. 5.6 shows the implementation plan based on OpenStack and related components as planned for Release 1. Hereby, the Monitor can be realized by Zabbix. The Controller is realized by OpenStack Nova [NOVA], Neutron [NEUT], and Cinder [CIND] for compute, network, and storage, respectively. The Inspector can be realized by Monasca [MONA] or a simple script querying Nova in order to map between physical and virtual resources. The Notifier will be realized by Ceilometer [CEIL] receiving failure events on its notification bus.
Fig. 5.7 shows the inner-workings of Ceilometer. After receiving an “event” on its notification bus, first a notification agent will grab the event and send a “notification” to the Collector. The collector writes the notifications received to the Ceilometer databases.
In the existing Ceilometer implementation, an alarm evaluator is periodically polling those databases through the APIs provided. If it finds new alarms, it will evaluate them based on the pre-defined alarm configuration, and depending on the configuration, it will hand a message to the Alarm Notifier, which in turn will send the alarm message northbound to the Consumer. Fig. 5.7 also shows an optimized work flow for Ceilometer with the goal to reduce the delay for fault notifications to the Consumer. The approach is to implement a new notification agent (called “publisher” in Ceilometer terminology) which is directly sending the alarm through the “Notification Bus” to a new “Notification-driven Alarm Evaluator (NAE)” (see Sections 5.6.2 and 5.6.3), thereby bypassing the Collector and avoiding the additional delay of the existing polling-based alarm evaluator. The NAE is similar to the OpenStack “Alarm Evaluator”, but is triggered by incoming notifications instead of periodically polling the OpenStack “Alarms” database for new alarms. The Ceilometer “Alarms” database can hold three states: “normal”, “insufficient data”, and “fired”. It is representing a persistent alarm database. In order to realize the Doctor requirements, we need to define new “meters” in the database (see Section 5.6.1).
Implementation plan in OpenStack (OPNFV Release 1 ”Arno”)¶
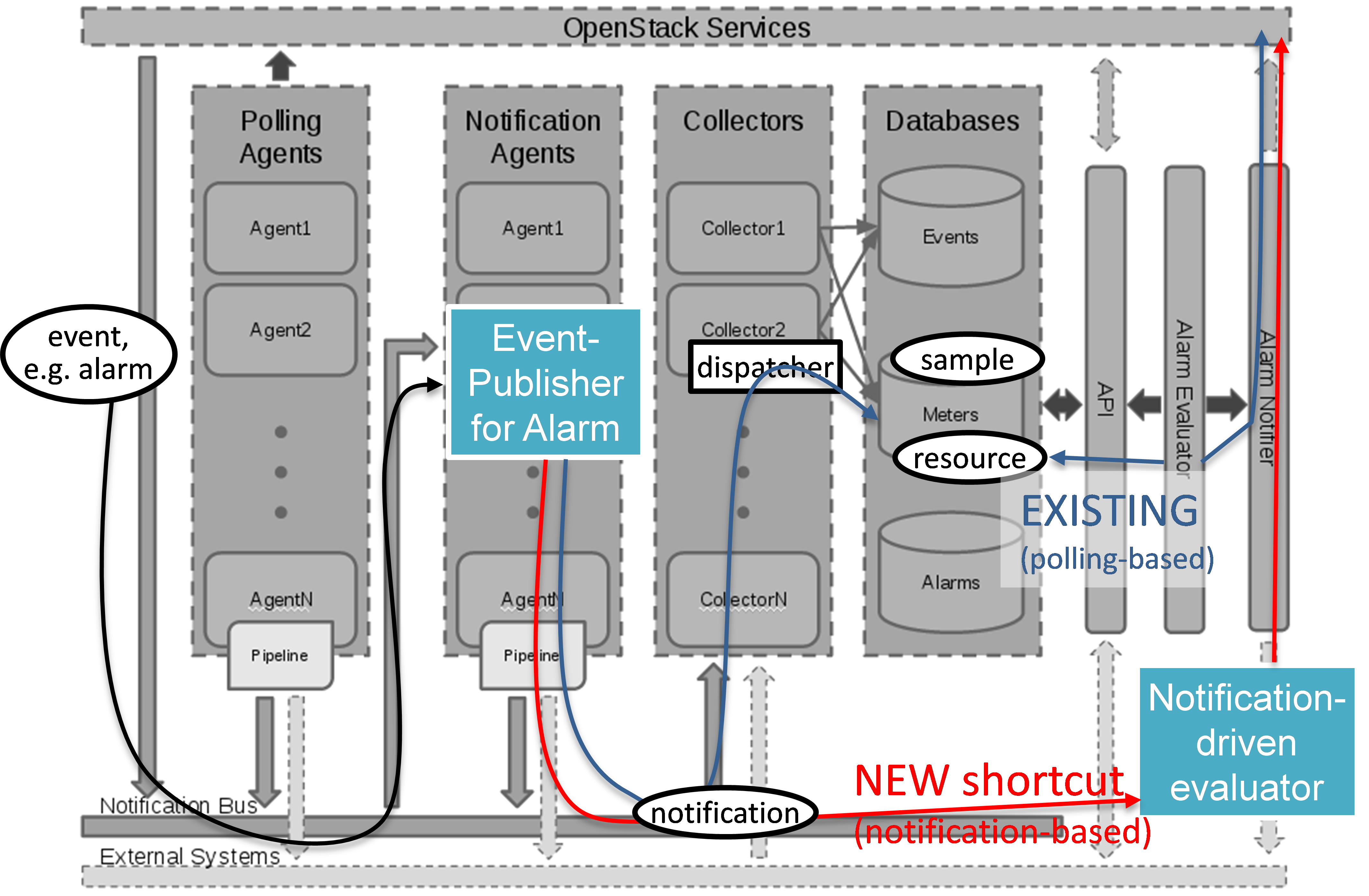
Implementation plan in Ceilometer architecture¶
5.3.2. NFVI Maintenance¶
For NFVI Maintenance, a quite similar implementation plan exists. Instead of a raw fault being observed by the Monitor, the Administrator is sending a Maintenance Request through the northbound interface towards the Controller residing in the VIM. Similar to the Fault Management use case, the Controller (in our case OpenStack Nova) will send a maintenance event to the Notifier (i.e. Ceilometer in our implementation). Within Ceilometer, the same workflow as described in the previous section applies. In addition, the Controller(s) will take appropriate actions to evacuate the physical machines in order to prepare them for the planned maintenance operation. After the physical machines are emptied, the Controller will inform the Administrator that it can initiate the maintenance. Alternatively the VMs can just be shut down and boot up on the same host after maintenance is over. There needs to be policy for administrator to know the plan for VMs in maintenance.
5.4. Information elements¶
This section introduces all attributes and information elements used in the messages exchange on the northbound interfaces between the VIM and the VNFO and VNFM.
Note: The information elements will be aligned with current work in ETSI NFV IFA working group.
Simple information elements:
- SubscriptionID (Identifier): identifies a subscription to receive fault or maintenance notifications.
- NotificationID (Identifier): identifies a fault or maintenance notification.
- VirtualResourceID (Identifier): identifies a virtual resource affected by a fault or a maintenance action of the underlying physical resource.
- PhysicalResourceID (Identifier): identifies a physical resource affected by a fault or maintenance action.
- VirtualResourceState (String): state of a virtual resource, e.g. “normal”, “maintenance”, “down”, “error”.
- PhysicalResourceState (String): state of a physical resource, e.g. “normal”, “maintenance”, “down”, “error”.
- VirtualResourceType (String): type of the virtual resource, e.g. “virtual machine”, “virtual memory”, “virtual storage”, “virtual CPU”, or “virtual NIC”.
- FaultID (Identifier): identifies the related fault in the underlying physical resource. This can be used to correlate different fault notifications caused by the same fault in the physical resource.
- FaultType (String): Type of the fault. The allowed values for this parameter depend on the type of the related physical resource. For example, a resource of type “compute hardware” may have faults of type “CPU failure”, “memory failure”, “network card failure”, etc.
- Severity (Integer): value expressing the severity of the fault. The higher the value, the more severe the fault.
- MinSeverity (Integer): value used in filter information elements. Only faults with a severity higher than the MinSeverity value will be notified to the Consumer.
- EventTime (Datetime): Time when the fault was observed.
- EventStartTime and EventEndTime (Datetime): Datetime range that can be used in a FaultQueryFilter to narrow down the faults to be queried.
- ProbableCause (String): information about the probable cause of the fault.
- CorrelatedFaultID (Integer): list of other faults correlated to this fault.
- isRootCause (Boolean): Parameter indicating if this fault is the root for other correlated faults. If TRUE, then the faults listed in the parameter CorrelatedFaultID are caused by this fault.
- FaultDetails (Key-value pair): provides additional information about the fault, e.g. information about the threshold, monitored attributes, indication of the trend of the monitored parameter.
- FirmwareVersion (String): current version of the firmware of a physical resource.
- HypervisorVersion (String): current version of a hypervisor.
- ZoneID (Identifier): Identifier of the resource zone. A resource zone is the logical separation of physical and software resources in an NFVI deployment for physical isolation, redundancy, or administrative designation.
- Metadata (Key-value pair): provides additional information of a physical resource in maintenance/error state.
Complex information elements (see also UML diagrams in Fig. 5.8 and Fig. 5.9):
- VirtualResourceInfoClass:
- VirtualResourceID [1] (Identifier)
- VirtualResourceState [1] (String)
- Faults [0..*] (FaultClass): For each resource, all faults including detailed information about the faults are provided.
- FaultClass: The parameters of the FaultClass are partially based on ETSI TS
132 111-2 (V12.1.0) [*], which is specifying fault management in 3GPP, in
particular describing the information elements used for alarm notifications.
- FaultID [1] (Identifier)
- FaultType [1] (String)
- Severity [1] (Integer)
- EventTime [1] (Datetime)
- ProbableCause [1] (String)
- CorrelatedFaultID [0..*] (Identifier)
- FaultDetails [0..*] (Key-value pair)
| [*] | http://www.etsi.org/deliver/etsi_ts/132100_132199/13211102/12.01.00_60/ts_13211102v120100p.pdf |
- SubscribeFilterClass
- VirtualResourceType [0..*] (String)
- VirtualResourceID [0..*] (Identifier)
- FaultType [0..*] (String)
- MinSeverity [0..1] (Integer)
- FaultQueryFilterClass: narrows down the FaultQueryRequest, for example it
limits the query to certain physical resources, a certain zone, a given fault
type/severity/cause, or a specific FaultID.
- VirtualResourceType [0..*] (String)
- VirtualResourceID [0..*] (Identifier)
- FaultType [0..*] (String)
- MinSeverity [0..1] (Integer)
- EventStartTime [0..1] (Datetime)
- EventEndTime [0..1] (Datetime)
- PhysicalResourceStateClass:
- PhysicalResourceID [1] (Identifier)
- PhysicalResourceState [1] (String): mandates the new state of the physical resource.
- Metadata [0..*] (Key-value pair)
- PhysicalResourceInfoClass:
- PhysicalResourceID [1] (Identifier)
- PhysicalResourceState [1] (String)
- FirmwareVersion [0..1] (String)
- HypervisorVersion [0..1] (String)
- ZoneID [0..1] (Identifier)
- Metadata [0..*] (Key-value pair)
- StateQueryFilterClass: narrows down a StateQueryRequest, for example it limits
the query to certain physical resources, a certain zone, or a given resource
state (e.g., only resources in “maintenance” state).
- PhysicalResourceID [1] (Identifier)
- PhysicalResourceState [1] (String)
- ZoneID [0..1] (Identifier)
5.5. Detailed northbound interface specification¶
This section is specifying the northbound interfaces for fault management and NFVI maintenance between the VIM on the one end and the Consumer and the Administrator on the other ends. For each interface all messages and related information elements are provided.
Note: The interface definition will be aligned with current work in ETSI NFV IFA working group .
All of the interfaces described below are produced by the VIM and consumed by the Consumer or Administrator.
5.5.1. Fault management interface¶
This interface allows the VIM to notify the Consumer about a virtual resource that is affected by a fault, either within the virtual resource itself or by the underlying virtualization infrastructure. The messages on this interface are shown in Fig. 5.8 and explained in detail in the following subsections.
Note: The information elements used in this section are described in detail in Section 5.4.

Fault management NB I/F messages¶
5.5.1.1. SubscribeRequest (Consumer -> VIM)¶
Subscription from Consumer to VIM to be notified about faults of specific resources. The faults to be notified about can be narrowed down using a subscribe filter.
Parameters:
- SubscribeFilter [1] (SubscribeFilterClass): Optional information to narrow down the faults that shall be notified to the Consumer, for example limit to specific VirtualResourceID(s), severity, or cause of the alarm.
5.5.1.2. SubscribeResponse (VIM -> Consumer)¶
Response to a subscribe request message including information about the subscribed resources, in particular if they are in “fault/error” state.
Parameters:
- SubscriptionID [1] (Identifier): Unique identifier for the subscription. It can be used to delete or update the subscription.
- VirtualResourceInfo [0..*] (VirtualResourceInfoClass): Provides additional information about the subscribed resources, i.e., a list of the related resources, the current state of the resources, etc.
5.5.1.3. FaultNotification (VIM -> Consumer)¶
Notification about a virtual resource that is affected by a fault, either within the virtual resource itself or by the underlying virtualization infrastructure. After reception of this request, the Consumer will decide on the optimal action to resolve the fault. This includes actions like switching to a hot standby virtual resource, migration of the fault virtual resource to another physical machine, termination of the faulty virtual resource and instantiation of a new virtual resource in order to provide a new hot standby resource. In some use cases the Consumer can leave virtual resources on failed host to be booted up again after fault is recovered. Existing resource management interfaces and messages between the Consumer and the VIM can be used for those actions, and there is no need to define additional actions on the Fault Management Interface.
Parameters:
- NotificationID [1] (Identifier): Unique identifier for the notification.
- VirtualResourceInfo [1..*] (VirtualResourceInfoClass): List of faulty resources with detailed information about the faults.
5.5.1.4. FaultQueryRequest (Consumer -> VIM)¶
Request to find out about active alarms at the VIM. A FaultQueryFilter can be used to narrow down the alarms returned in the response message.
Parameters:
- FaultQueryFilter [1] (FaultQueryFilterClass): narrows down the FaultQueryRequest, for example it limits the query to certain physical resources, a certain zone, a given fault type/severity/cause, or a specific FaultID.
5.5.1.5. FaultQueryResponse (VIM -> Consumer)¶
List of active alarms at the VIM matching the FaultQueryFilter specified in the FaultQueryRequest.
Parameters:
- VirtualResourceInfo [0..*] (VirtualResourceInfoClass): List of faulty resources. For each resource all faults including detailed information about the faults are provided.
5.5.2. NFVI maintenance¶
The NFVI maintenance interfaces Consumer-VIM allows the Consumer to subscribe to maintenance notifications provided by the VIM. The related maintenance interface Administrator-VIM allows the Administrator to issue maintenance requests to the VIM, i.e. requesting the VIM to take appropriate actions to empty physical machine(s) in order to execute maintenance operations on them. The interface also allows the Administrator to query the state of physical machines, e.g., in order to get details in the current status of the maintenance operation like a firmware update.
The messages defined in these northbound interfaces are shown in Fig. 5.9 and described in detail in the following subsections.
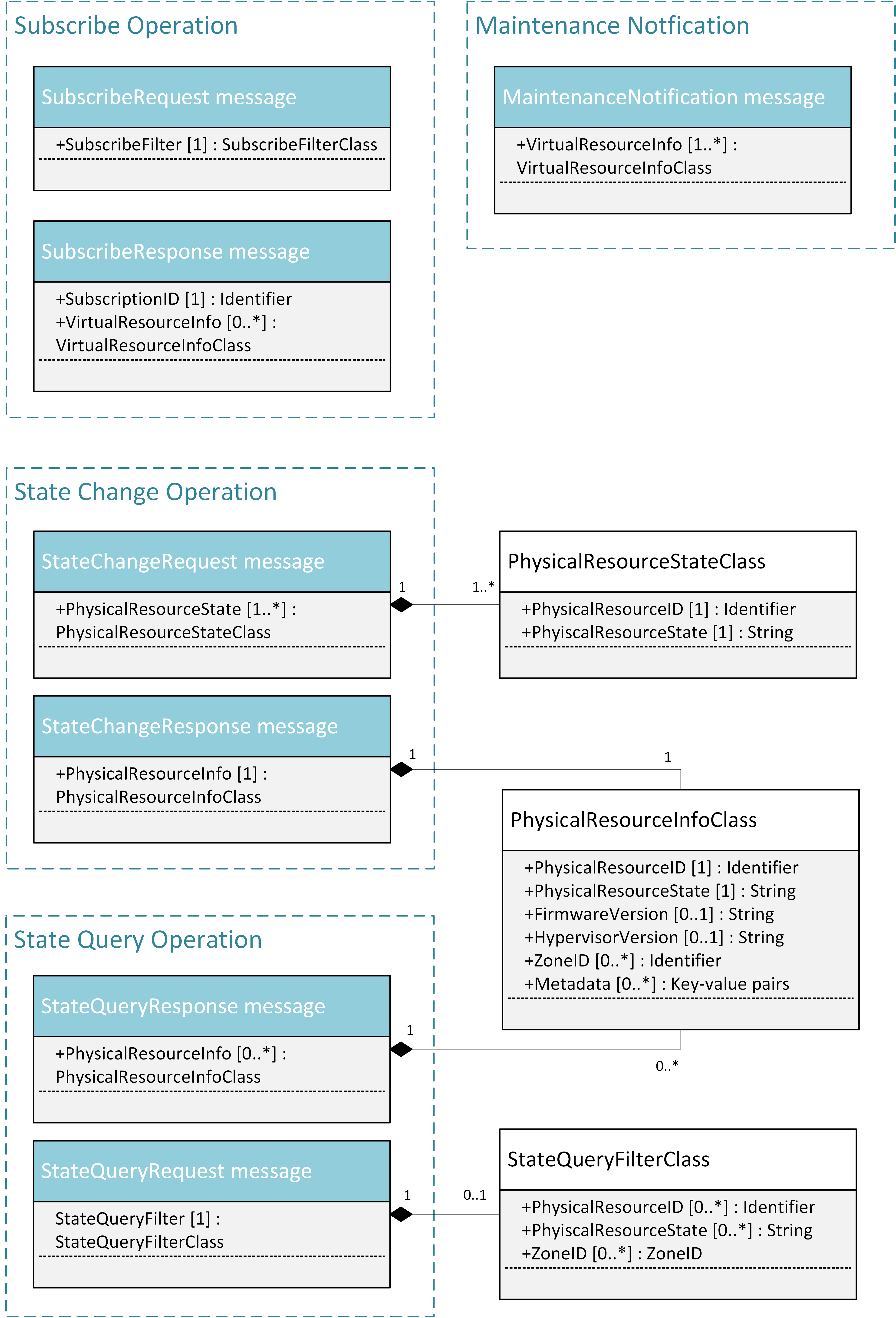
NFVI maintenance NB I/F messages¶
5.5.2.1. SubscribeRequest (Consumer -> VIM)¶
Subscription from Consumer to VIM to be notified about maintenance operations for specific virtual resources. The resources to be informed about can be narrowed down using a subscribe filter.
Parameters:
- SubscribeFilter [1] (SubscribeFilterClass): Information to narrow down the faults that shall be notified to the Consumer, for example limit to specific virtual resource type(s).
5.5.2.2. SubscribeResponse (VIM -> Consumer)¶
Response to a subscribe request message, including information about the subscribed virtual resources, in particular if they are in “maintenance” state.
Parameters:
- SubscriptionID [1] (Identifier): Unique identifier for the subscription. It can be used to delete or update the subscription.
- VirtualResourceInfo [0..*] (VirtalResourceInfoClass): Provides additional information about the subscribed virtual resource(s), e.g., the ID, type and current state of the resource(s).
5.5.2.3. MaintenanceNotification (VIM -> Consumer)¶
Notification about a physical resource switched to “maintenance” state. After reception of this request, the Consumer will decide on the optimal action to address this request, e.g., to switch to the standby (STBY) configuration.
Parameters:
- VirtualResourceInfo [1..*] (VirtualResourceInfoClass): List of virtual resources where the state has been changed to maintenance.
5.5.2.4. StateChangeRequest (Administrator -> VIM)¶
Request to change the state of a list of physical resources, e.g. to “maintenance” state, in order to prepare them for a planned maintenance operation.
Parameters:
- PhysicalResourceState [1..*] (PhysicalResourceStateClass)
5.5.2.5. StateChangeResponse (VIM -> Administrator)¶
Response message to inform the Administrator that the requested resources are now in maintenance state (or the operation resulted in an error) and the maintenance operation(s) can be executed.
Parameters:
- PhysicalResourceInfo [1..*] (PhysicalResourceInfoClass)
5.5.2.6. StateQueryRequest (Administrator -> VIM)¶
In this procedure, the Administrator would like to get the information about physical machine(s), e.g. their state (“normal”, “maintenance”), firmware version, hypervisor version, update status of firmware and hypervisor, etc. It can be used to check the progress during firmware update and the confirmation after update. A filter can be used to narrow down the resources returned in the response message.
Parameters:
- StateQueryFilter [1] (StateQueryFilterClass): narrows down the StateQueryRequest, for example it limits the query to certain physical resources, a certain zone, or a given resource state.
5.5.2.7. StateQueryResponse (VIM -> Administrator)¶
List of physical resources matching the filter specified in the StateQueryRequest.
Parameters:
- PhysicalResourceInfo [0..*] (PhysicalResourceInfoClass): List of physical resources. For each resource, information about the current state, the firmware version, etc. is provided.
5.5.3. NFV IFA, OPNFV Doctor and AODH alarms¶
This section compares the alarm interfaces of ETSI NFV IFA with the specifications of this document and the alarm class of AODH.
ETSI NFV specifies an interface for alarms from virtualised resources in ETSI GS NFV-IFA 005 [ENFV]. The interface specifies an Alarm class and two notifications plus operations to query alarm instances and to subscribe to the alarm notifications.
The specification in this document has a structure that is very similar to the ETSI NFV specifications. The notifications differ in that an alarm notification in the NFV interface defines a single fault for a single resource while the notification specified in this document can contain multiple faults for multiple resources. The Doctor specification is lacking the detailed time stamps of the NFV specification essential for synchronizaion of the alarm list using the query operation. The detailed time stamps are also of value in the event and alarm history DBs.
AODH defines a base class for alarms, not the notifications. This means that some of the dynamic attributes of the ETSI NFV alarm type, like alarmRaisedTime, are not applicable to the AODH alarm class but are attributes of in the actual notifications. (Description of these attributes will be added later.) The AODH alarm class is lacking some attributes present in the NFV specification, fault details and correlated alarms. Instead the AODH alarm class has attributes for actions, rules and user and project id.
| ETSI NFV Alarm Type | OPNFV Doctor Req Spec | AODH Alarm Type |
|---|---|---|
| AlarmId | FaultId | Alarm Id |
| managedObjectId | virtualResourceId | (N/A) |
| - | - | User_Id, Project_Id |
| alarmRaisedTime | - | (N/A) |
| alarmChangedTime | - | (N/A) |
| alarmClearedTime | - | (N/A) |
| alarmState: New, Updated, Cleared | virtualResourceState (e.g. normal, maintenance, down, error) | State: ok, alarm, insufficient data |
| vrPerceivedSeverity: Critical, Major, Minor, Warning, Indeterminate, Cleared | Severity (Integer) | Severity: low, moderate, critical |
| eventTime (unclear?) | EventTime | (N/A) |
| faultType | FaultType | type |
| probableCause | ProbableCause | description |
| isRootCause | IsRootCause | - |
| correlatedAlarmId | CorrelatedFaultId | - |
| faultDetails | FaultDetails | - |
| - | - | actions, rule, time constraints |
Table: Comparison of alarm attributes
The primary area of improvement should be alignment of the perceived severity. This is important for a quick and accurate evaluation of the alarm. AODH thus should support also the X.733 values Critical, Major, Minor, Warning and Indeterminate.
The detailed time stamps (raised, changed, cleared) which are essential for synchronizing the alarm list using a query operation should be added to the Doctor specification.
Other areas that need alignment is the so called alarm state in NFV. Here we must however consider what can be attributes of the notification vs. what should be a property of the alarm instance. This will be analyzed later.
5.6. Detailed southbound interface specification¶
This section is specifying the southbound interfaces for fault management between the Monitors and the Inspector. Although southbound interfaces should be flexible to handle various events from different types of Monitors, we define unified event API in order to improve interoperability between the Monitors and the Inspector. This is not limiting implementation of Monitor and Inspector as these could be extended in order to support failures from intelligent inspection like prediction.
Note: The interface definition will be aligned with current work in ETSI NFV IFA working group.
5.6.1. Fault event interface¶
This interface allows the Monitors to notify the Inspector about an event which was captured by the Monitor and may effect resources managed in the VIM.
5.6.1.1. EventNotification¶
Event notification including fault description. The entity of this notification is event, and not fault or error specifically. This allows us to use generic event format or framework build out of Doctor project. The parameters below shall be mandatory, but keys in ‘Details’ can be optional.
Parameters:
- Time [1]: Datetime when the fault was observed in the Monitor.
- Type [1]: Type of event that will be used to process correlation in Inspector.
- Details [0..1]: Details containing additional information with Key-value pair style. Keys shall be defined depending on the Type of the event.
E.g.:
{
'event': {
'time': '2016-04-12T08:00:00',
'type': 'compute.host.down',
'details': {
'hostname': 'compute-1',
'source': 'sample_monitor',
'cause': 'link-down',
'severity': 'critical',
'status': 'down',
'monitor_id': 'monitor-1',
'monitor_event_id': '123',
}
}
}
Optional parameters in ‘Details’:
- Hostname: the hostname on which the event occurred.
- Source: the display name of reporter of this event. This is not limited to monitor, other entity can be specified such as ‘KVM’.
- Cause: description of the cause of this event which could be different from the type of this event.
- Severity: the severity of this event set by the monitor.
- Status: the status of target object in which error occurred.
- MonitorID: the ID of the monitor sending this event.
- MonitorEventID: the ID of the event in the monitor. This can be used by operator while tracking the monitor log.
- RelatedTo: the array of IDs which related to this event.
Also, we can have bulk API to receive multiple events in a single HTTP POST message by using the ‘events’ wrapper as follows:
{
'events': [
'event': {
'time': '2016-04-12T08:00:00',
'type': 'compute.host.down',
'details': {},
},
'event': {
'time': '2016-04-12T08:00:00',
'type': 'compute.host.nic.error',
'details': {},
}
]
}
5.7. Blueprints¶
This section is listing a first set of blueprints that have been proposed by the Doctor project to the open source community. Further blueprints addressing other gaps identified in Section 4 will be submitted at a later stage of the OPNFV. In this section the following definitions are used:
- “Event” is a message emitted by other OpenStack services such as Nova and Neutron and is consumed by the “Notification Agents” in Ceilometer.
- “Notification” is a message generated by a “Notification Agent” in Ceilometer based on an “event” and is delivered to the “Collectors” in Ceilometer that store those notifications (as “sample”) to the Ceilometer “Databases”.
5.7.1. Instance State Notification (Ceilometer) [†]¶
The Doctor project is planning to handle “events” and “notifications” regarding Resource Status; Instance State, Port State, Host State, etc. Currently, Ceilometer already receives “events” to identify the state of those resources, but it does not handle and store them yet. This is why we also need a new event definition to capture those resource states from “events” created by other services.
This BP proposes to add a new compute notification state to handle events from an instance (server) from nova. It also creates a new meter “instance.state” in OpenStack.
| [†] | https://etherpad.opnfv.org/p/doctor_bps |
5.7.2. Event Publisher for Alarm (Ceilometer) [‡]¶
Problem statement:
The existing “Alarm Evaluator” in OpenStack Ceilometer is periodically querying/polling the databases in order to check all alarms independently from other processes. This is adding additional delay to the fault notification send to the Consumer, whereas one requirement of Doctor is to react on faults as fast as possible.
The existing message flow is shown in Fig. 5.7: after receiving an “event”, a “notification agent” (i.e. “event publisher”) will send a “notification” to a “Collector”. The “collector” is collecting the notifications and is updating the Ceilometer “Meter” database that is storing information about the “sample” which is capured from original “event”. The “Alarm Evaluator” is periodically polling this databases then querying “Meter” database based on each alarm configuration.
In the current Ceilometer implementation, there is no possibility to directly trigger the “Alarm Evaluator” when a new “event” was received, but the “Alarm Evaluator” will only find out that requires firing new notification to the Consumer when polling the database.
Change/feature request:
This BP proposes to add a new “event publisher for alarm”, which is bypassing several steps in Ceilometer in order to avoid the polling-based approach of the existing Alarm Evaluator that makes notification slow to users.
After receiving an “(alarm) event” by listening on the Ceilometer message queue (“notification bus”), the new “event publisher for alarm” immediately hands a “notification” about this event to a new Ceilometer component “Notification-driven alarm evaluator” proposed in the other BP (see Section 5.6.3).
Note, the term “publisher” refers to an entity in the Ceilometer architecture (it is a “notification agent”). It offers the capability to provide notifications to other services outside of Ceilometer, but it is also used to deliver notifications to other Ceilometer components (e.g. the “Collectors”) via the Ceilometer “notification bus”.
Implementation detail
- “Event publisher for alarm” is part of Ceilometer
- The standard AMQP message queue is used with a new topic string.
- No new interfaces have to be added to Ceilometer.
- “Event publisher for Alarm” can be configured by the Administrator of Ceilometer to be used as “Notification Agent” in addition to the existing “Notifier”
- Existing alarm mechanisms of Ceilometer can be used allowing users to configure how to distribute the “notifications” transformed from “events”, e.g. there is an option whether an ongoing alarm is re-issued or not (“repeat_actions”).
| [‡] | https://etherpad.opnfv.org/p/doctor_bps |
5.7.3. Notification-driven alarm evaluator (Ceilometer) [§]¶
Problem statement:
The existing “Alarm Evaluator” in OpenStack Ceilometer is periodically querying/polling the databases in order to check all alarms independently from other processes. This is adding additional delay to the fault notification send to the Consumer, whereas one requirement of Doctor is to react on faults as fast as possible.
Change/feature request:
This BP is proposing to add an alternative “Notification-driven Alarm Evaluator” for Ceilometer that is receiving “notifications” sent by the “Event Publisher for Alarm” described in the other BP. Once this new “Notification-driven Alarm Evaluator” received “notification”, it finds the “alarm” configurations which may relate to the “notification” by querying the “alarm” database with some keys i.e. resource ID, then it will evaluate each alarm with the information in that “notification”.
After the alarm evaluation, it will perform the same way as the existing “alarm evaluator” does for firing alarm notification to the Consumer. Similar to the existing Alarm Evaluator, this new “Notification-driven Alarm Evaluator” is aggregating and correlating different alarms which are then provided northbound to the Consumer via the OpenStack “Alarm Notifier”. The user/administrator can register the alarm configuration via existing Ceilometer API [¶]. Thereby, he can configure whether to set an alarm or not and where to send the alarms to.
Implementation detail
- The new “Notification-driven Alarm Evaluator” is part of Ceilometer.
- Most of the existing source code of the “Alarm Evaluator” can be re-used to implement this BP
- No additional application logic is needed
- It will access the Ceilometer Databases just like the existing “Alarm evaluator”
- Only the polling-based approach will be replaced by a listener for “notifications” provided by the “Event Publisher for Alarm” on the Ceilometer “notification bus”.
- No new interfaces have to be added to Ceilometer.
| [§] | https://etherpad.opnfv.org/p/doctor_bps |
| [¶] | https://wiki.openstack.org/wiki/Ceilometer/Alerting |
5.7.4. Report host fault to update server state immediately (Nova) [#]¶
Problem statement:
- Nova state change for failed or unreachable host is slow and does not reliably state host is down or not. This might cause same server instance to run twice if action taken to evacuate instance to another host.
- Nova state for server(s) on failed host will not change, but remains active and running. This gives the user false information about server state.
- VIM northbound interface notification of host faults towards VNFM and NFVO should be in line with OpenStack state. This fault notification is a Telco requirement defined in ETSI and will be implemented by OPNFV Doctor project.
- Openstack user cannot make HA actions fast and reliably by trusting server state and host state.
Proposed change:
There needs to be a new API for Admin to state host is down. This API is used to mark services running in host down to reflect the real situation.
Example on compute node is:
When compute node is up and running::
vm_state: activeand power_state: running nova-compute state: up status: enabled
When compute node goes down and new API is called to state host is down::
vm_state: stopped power_state: shutdown nova-compute state: down status: enabled
Alternatives:
There is no attractive alternative to detect all different host faults than to have an external tool to detect different host faults. For this kind of tool to exist there needs to be new API in Nova to report fault. Currently there must be some kind of workarounds implemented as cannot trust or get the states from OpenStack fast enough.
| [#] | https://blueprints.launchpad.net/nova/+spec/update-server-state-immediately |
6. Summary and conclusion¶
The Doctor project aimed at detailing NFVI fault management and NFVI maintenance requirements. These are indispensable operations for an Operator, and extremely necessary to realize telco-grade high availability. High availability is a large topic; the objective of Doctor is not to realize a complete high availability architecture and implementation. Instead, Doctor limited itself to addressing the fault events in NFVI, and proposes enhancements necessary in VIM, e.g. OpenStack, to ensure VNFs availability in such fault events, taking a Telco VNFs application level management system into account.
The Doctor project performed a robust analysis of the requirements from NFVI fault management and NFVI maintenance operation, concretely found out gaps in between such requirements and the current implementation of OpenStack, and proposed potential development plans to fill out such gaps in OpenStack. Blueprints are already under investigation and the next step is to fill out those gaps in OpenStack by code development in the coming releases.
7. Annex: NFVI Faults¶
Faults in the listed elements need to be immediately notified to the Consumer in order to perform an immediate action like live migration or switch to a hot standby entity. In addition, the Administrator of the host should trigger a maintenance action to, e.g., reboot the server or replace a defective hardware element.
Faults can be of different severity, i.e., critical, warning, or info. Critical faults require immediate action as a severe degradation of the system has happened or is expected. Warnings indicate that the system performance is going down: related actions include closer (e.g. more frequent) monitoring of that part of the system or preparation for a cold migration to a backup VM. Info messages do not require any action. We also consider a type “maintenance”, which is no real fault, but may trigger maintenance actions like a re-boot of the server or replacement of a faulty, but redundant HW.
Faults can be gathered by, e.g., enabling SNMP and installing some open source tools to catch and poll SNMP. When using for example Zabbix one can also put an agent running on the hosts to catch any other fault. In any case of failure, the Administrator should be notified. The following tables provide a list of high level faults that are considered within the scope of the Doctor project requiring immediate action by the Consumer.
Compute/Storage
| Fault | Severity | How to detect? | Comment | Immediate action to recover |
|---|---|---|---|---|
| Processor/CPU failure, CPU condition not ok | Critical | Zabbix | Switch to hot standby | |
| Memory failure/ Memory condition not ok | Critical | Zabbix (IPMI) | Switch to hot standby | |
| Network card failure, e.g. network adapter connectivity lost | Critical | Zabbix/ Ceilometer | Switch to hot standby | |
| Disk crash | Info | RAID monitoring | Network storage is very redundant (e.g. RAID system) and can guarantee high availability | Inform OAM |
| Storage controller | Critical | Zabbix (IPMI) | Live migration if storage is still accessible; otherwise hot standby | |
| PDU/power failure, power off, server reset | Critical | Zabbix/ Ceilometer | Switch to hot standby | |
| Power degration, power redundancy lost, power threshold exceeded | Warning | SNMP | Live migration | |
| Chassis problem (e.g. fan degraded/failed, chassis power degraded), CPU fan problem, temperature/ thermal condition not ok | Warning | SNMP | Live migration | |
| Mainboard failure | Critical | Zabbix (IPMI) | e.g. PCIe, SAS link failure | Switch to hot standby |
| OS crash (e.g. kernel panic) | Critical | Zabbix | Switch to hot standby |
Hypervisor
| Fault | Severity | How to detect? | Comment | Immediate action to recover |
|---|---|---|---|---|
| System has restarted | Critical | Zabbix | Switch to hot standby | |
| Hypervisor failure | Warning/ Critical | Zabbix/ Ceilometer | Evacuation/switch to hot standby | |
| Hypervisor status not retrievable after certain period | Warning | Alarming service | Zabbix/ Ceilometer unreachable | Rebuild VM |
Network
| Fault | Severity | How to detect? | Comment | Immediate action to recover |
|---|---|---|---|---|
| SDN/OpenFlow switch, controller degraded/failed | Critical | Ceilo- meter | Switch to hot standby or reconfigure virtual network topology | |
| Hardware failure of physical switch/router | Warning | SNMP | Redundancy of physical infrastructure is reduced or no longer available | Live migration if possible otherwise evacuation |
References and bibliography¶
| [DOCT] | OPNFV, “Doctor” requirements project, [Online]. Available at https://wiki.opnfv.org/doctor |
| [PRED] | OPNFV, “Data Collection for Failure Prediction” requirements project [Online]. Available at https://wiki.opnfv.org/prediction |
| [OPSK] | OpenStack, [Online]. Available at https://www.openstack.org/ |
| [CEIL] | OpenStack Telemetry (Ceilometer), [Online]. Available at https://wiki.openstack.org/wiki/Ceilometer |
| [NOVA] | OpenStack Nova, [Online]. Available at https://wiki.openstack.org/wiki/Nova |
| [NEUT] | OpenStack Neutron, [Online]. Available at https://wiki.openstack.org/wiki/Neutron |
| [CIND] | OpenStack Cinder, [Online]. Available at https://wiki.openstack.org/wiki/Cinder |
| [MONA] | OpenStack Monasca, [Online], Available at https://wiki.openstack.org/wiki/Monasca |
| [OSAG] | OpenStack Cloud Administrator Guide, [Online]. Available at http://docs.openstack.org/admin-guide-cloud/content/ |
| [ZABB] | ZABBIX, the Enterprise-class Monitoring Solution for Everyone, [Online]. Available at http://www.zabbix.com/ |
| [ENFV] | ETSI NFV, [Online]. Available at http://www.etsi.org/technologies-clusters/technologies/nfv |